http://sites.schaltungen.at/elektronik/sensoren
http://www.linksammlung.info/
http://www.schaltungen.at/
Wels, am 2012-10-08
BITTE nützen Sie doch rechts OBEN das Suchfeld
[ ] [ Diese Site durchsuchen]
DIN A3 oder DIN A4 quer ausdrucken
*******************************************************************************I**
DIN A4 ausdrucken siehe
http://sites.schaltungen.at/drucker/sites-prenninger
********************************************************I*
~015_b_PrennIng-a_elektronik-sensoren (xx Seiten)_1a.pdf
Untergeordnete Seiten (2):
Regen-Sensoren
SODIAL(R) Regensensor YL-38 / FC-37
Regenwasser Modul Regen Erkennung Modul 3,3V-5V
Dieser Regensensor reagiert auf Regentropfen oder Schnee, die auf einen Leiterkammeiner Platine fallen und einzelne Leiterbahnen miteinander verbinden, wodurch sich der Widerstand ändert (Regenwasser enthält auch immer einige Bestandteile, die es etwas leitfähig machen).
Den analogen Ausgang des Sensors (direkt am Kamm angeschlossen,siehe Schaltung) kann man verwenden, um die Leitfähigkeit des Regens (oder auch dessenStärke) zu erkennen.
Über den digitalen Ausgang wird der Regen an einen Digitaleingangdes Raspberry Pi gemeldet, wobei hier die Schaltschwelle einstellbar ist.
Mit dem Potentiometer auf der Platine wird der Schwellwert festgelegt, bei dem der digitale Ausgang von "0" auf "1" schaltet.
Das folgende Bild zeigt den von vielen Anbieternerhältlichen Sensor (auch von Amazon oder Ebay).
Die Betriebsspannung kann zwischen 3,3V und 5,0V liegen.
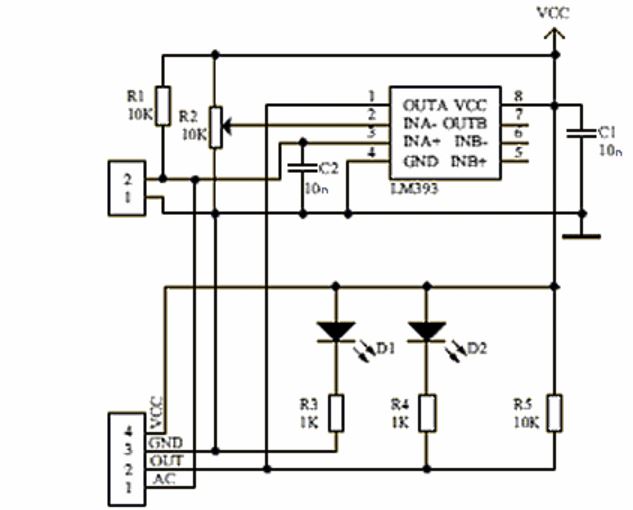
Die Schaltung bestehteigentlich nur auf einem Komparator LM393 und dessen Beschaltung.
Erhältlichist das Board zusammen mit der Sensorfläche und Kabeln bei Amazon oder Ebay.
Die Sensorfläche von ca. 5x4cm des Kammsensors hat eine vernickelte Oberfläche, um einen Schutz vor Oxidation zu bieten.
Derzeit wird nur der Komparator-Ausganggenutzt (digitaler Ausgang).
Das folgende Bild zeigt die Schaltung.
Neben dem Komparator sind noch 2 LEDs auf dem Board untergebracht, eine zur Betriebsanzeige und eine weitere, die am Ausgang des Komparators angeschlossen ist und Niederschlag anzeigt.
Der Sensor muss auf jedem Fall schräg montiert werden, damit das Wasser abläuft.
Auch dann dauert es nach Ende des Regens immer etwas, bis der Sensor wieder trocken genug ist.
Um wirklich halbwegs den Zeitpunkt von Niederschlägen nzuzeigen, muss der Sensor geheizt werden.
Das ist auch deswegen notwendig, damit er auch Schnee vernünftig detektieren kann.
Zum Heizen eignen sich einige Widerstände oder eine kleine Heizfolie.
Es hat sich schon gezeigt, dass dieser extrem preiswerte Sensor noch nicht der Weisheit letzter Schluss ist.
Die Widerstandsmessung ist doch recht ungenau und hängt nicht nur vom Leitwert des Regens, sondern auch von Korrosion und Verschmutzung des Sensors ab.
Mögliche alternative Verfahren wären die Messung der Temperaturdifferenz zweier Kaltleiter (trocken, benetzt) oder die Messung der Kapazitätsänderung eines Sensors, der dann aber vor Witterung geschützt ist.
Bodenfeuchtigkeitssensor Sensor Wasser
Spannung: 3,3V..5,0V
Gewicht: 11g
Der Regensensor reagiert auf Regentropfen, wodurch sich der Widerstand am analogen Ausgang ändert.
Über den digitalen Ausgang kann ebenfalls Regen erkannt werden, hierbei kann der Potentiometer die Schwelle festlegen, ab wann der digitale Ausgang schaltet.
Lieferumfang:
YL-38 Sensor Controller Board
FC-37 Regensensor
2-adriges Kabel mit ca 15cm Länge
Bedenken Sie bitte auch, dass die Abfrage des Regensensors nur eine Momentaufnahmedarstellt.
Bei sehr leichtem Regen kann es vorkommen, dass mal Regen angezeigt wirdund bei der folgenden Messung nicht - je nachdem, wie gut die Sensorfläche geradebenetzt ist. Hier hilft nur, wiederholt zu messen und mehrere aufeinanderfolgende Messungen zu berücksichtigen.
Das Arduino-Programm weiter unten zeigt eine einfacheMöglichkeit, einzelne "Aussetzer" zu überbrücken.
http://www.netzmafia.de/skripten/hardware/RasPi/Projekt-Regensensor/index.html
Nr.18 Tropfensensor
Tropfensensor Code
int messwert=0;int PIEPS=6; //Mit dem Namen "PIEPS" wird jetzt der Pin6 bezeichnet, an dem ein Piezo-Speaker angeschlossen wird.
void setup(){Serial.begin(9600);pinMode (6,OUTPUT); //Im Setup wird der Pin6 als Ausgang festgelegt.}
void loop(){ messwert=analogRead(A0); Serial.print("Feuchtigkeits-Messwert:"); Serial.println(messwert); delay(500); if (messwert>400 ) //Hier beginnt die Abfrage: Wenn der Sensorwert größer als "400" ist, dann...{digitalWrite(PIEPS, HIGH); //...soll der Piezo-Speaker piepsen.}else //...ansonsten...{digitalWrite(PIEPS, LOW); //...soll er leise sein.}}
https://funduino.de/nr-17-tropfensensor
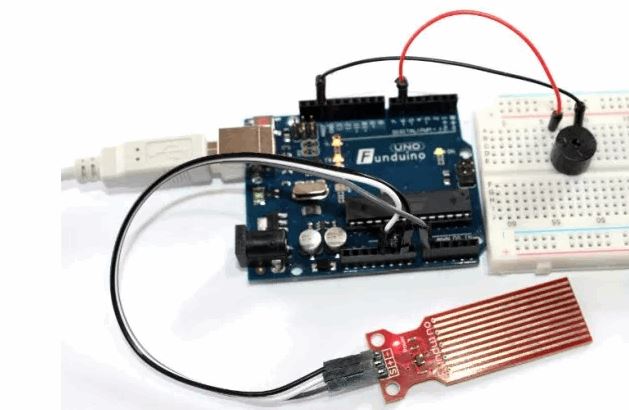
SODIAL (R) Boden Hygrometer Luftfeuchtigkeit Detektionsmodul Feuchtig keitspruefung Sensor fuer Arduino
Boden Hygrometer
Auf dem Bauteil steht HL-69 und mit diesem Begriff findet man auch passende Tutorials dazu
Guide for Soil Moisture Sensor YL-69 or HL-69 with Arduino
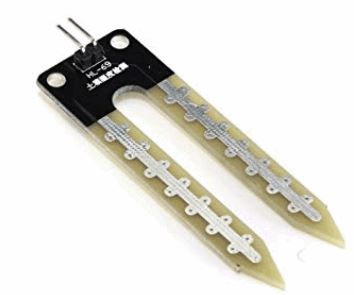
HL-69 Analogsensor, der Feuchtigkeit messen kann
2 Nirosta Stahlstäbe mit ca. 3mm Durchmesser gehen auch.
Man muß dann allerdings einen 1,8 Kiloohm Widerstand in Reihe setzen, um etwa die gleichen Werte wie bei dem original Sensor zu erhalten, oder man ändert den Schwellewert für die Einschaltung der Bewässerung.
YL-69
Dies ist eine Zusammenfassung des Bodenfeuchtesensor, die fuer Erkennung der Feuchtigkeit verwendet werden kann. Wenn der Boden trocken ist, wird das Modul ein Signal mit hohem Pegel, wenn als Ausgang niedrig.
Mit diesem Sensor machen eine automatische Bewaesserungsanlage, so dass Ihre Gartenpflanzen ohne Menschen verwalten.
Betriebsspannung: 3.3V ~ 5V
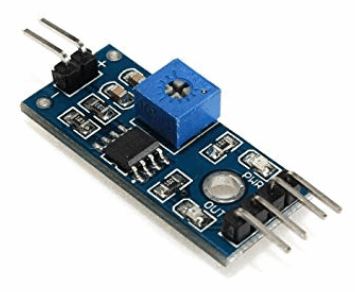
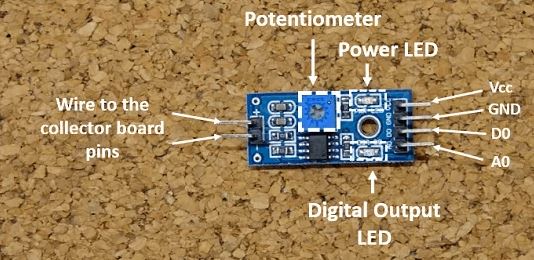
Einstellbare Empfindlichkeit (in blau digitales Potentiometer Einstellung gezeigt)
Dual-Ausgabemodus , Analogausgang genauer.
Eine feste Schraubenloch fuer eine einfache Installation.
Mit Power-Anzeige (rot) und digitalen Schaltausgang (gruen).
Mit LM393 Komparator-Chip, stabil.
Steuerung PCB Dimension: 3cm x 1.5cm
Bodensonde Dimension: 6cm x 2cm
Kabel laenge: 21cm
Schnittstellenbeschreibung (4-Draht):
VCC: 3,3 V-5V
GND:GND
DO: digitale Ausgangsschnittstelle (0 und 1)
AO: Analogausgangsschnittstelle
Gebrauchsanweisung:
Wenn Modul den Schwellenwert erreicht, wird in der Bodenfeuchte eingestellt, ist DO-Port-Ausgang hoch, wenn die Bodenfeuchte a eingestellten Schwellwert ueberschreitet , ist das Modul D0 Ausgang niedrig.
Der digitale Ausgang D0 kann direkt mit dem Mikrocontroller verbunden werden, damit durch den Mikrocontroller hohen und niedrigen Bodenfeuchte erkennt.
Die digitalen Ausgaenge DO-Shop Relaismodul kann direkt die Summer-Modul, das eine Bodenfeuchte Alarmanlagen bilden koennen
Analogausgang AO und AD-Modul schliesst durch den AD-Wandler an, koennen Sie genauere Werte der Bodenfeuchte erhalten.
Lieferumfang:
1 x Bodenfeuchte-Detektor-Modul
5 x Jumper Cables
1 x Probe
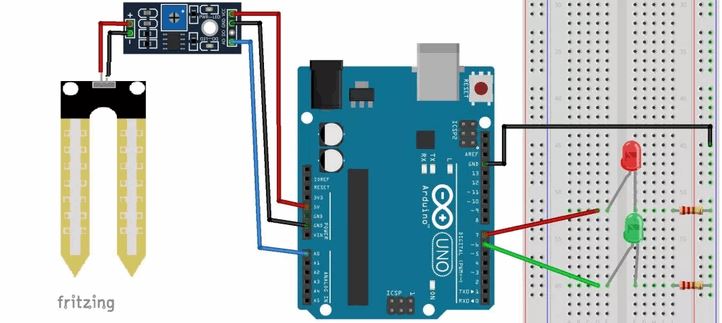
Im Lieferumfang war der Sensor, ein Kabel für Verbindung von Sensor und das Interface. Das Interface hat auf einer Seite + und - Anschluss für den Sensor, wie rum man den anklemmt ist egal. Auf der anderen Seite ist Versorgungsspannung (in meinem Fall 5V und GND), ein Analogausgang und ein Digitalausgang. Am Digitalausgang bekommt man ein Signal je nachdem welchen Schwellwert man einstellt. Ich nutze den Analogausgang für den Arduino.
Leider verhält sich der Sensor etwas unvorhersehbar. Der gemessene Wert hängt z.B. auch davon ab, in welcher Frequenz man misst. Ich habe mein Programm nämlich so eingestellt, dass ich den Sensor nur einschalte, wenn ich tatsächlich messen will. Das hat den Vorteil, dass der Sensor nicht so schnell verschleißt und sich auflöst.
Insgesamt kann ich sagen, der Sensor ist zwar brauchbar, man muss aber wirklich alles auf den speziellen Anwendungsfall anpassen und viel probieren und für konstante Bedingungen sorgen.
|
Pin
|
Wiring to Arduino Uno
|
|
A0
|
Analog Pins
|
|
D0
|
Digital Pins
|
|
GND
|
GND
|
|
VCC
|
5V
|
https://books.google.at/books?id=2nt4DwAAQBAJ&pg=PT81&lpg=PT81&dq=HL-69+Bodenfeuchtesensor&source=bl&ots=QH1FcEFvKi&sig=ACfU3U1yr22HSqM95AmJFTPs94LQpj_0aQ&hl=de&sa=X&ved=2ahUKEwiw046c85HkAhXM0qYKHZAWCccQ6AEwCXoECAgQAQ#v=onepage&q=HL-69%20Bodenfeuchtesensor&f=false
/* All the resources for this project: https://randomnerdtutorials.com/ */int rainPin = A0;int greenLED = 6;int redLED = 7;// you can adjust the threshold valueint thresholdValue = 800;void setup(){ pinMode(rainPin, INPUT); pinMode(greenLED, OUTPUT); pinMode(redLED, OUTPUT); digitalWrite(greenLED, LOW); digitalWrite(redLED, LOW); Serial.begin(9600);}void loop() { // read the input on analog pin 0: int sensorValue = analogRead(rainPin); Serial.print(sensorValue); if(sensorValue < thresholdValue){ Serial.println(" - Doesn't need watering"); digitalWrite(redLED, LOW); digitalWrite(greenLED, HIGH); } else { Serial.println(" - Time to water your plant"); digitalWrite(redLED, HIGH); digitalWrite(greenLED, LOW); } delay(500);}
Sketch: Arduino and Soil Moisture Sensor YL-69
// Watch video here: https://www.youtube.com/watch?v=BKp4ib1UQj8
/* Connection pins:
Arduino Soil Moisture Sensor YL-69
A0 Analog A0
5V VCC
GND GND
*/
void setup()
{
Serial.begin(9600);
pinMode(A0, INPUT); //set up analog pin 0 to be input
pinMode(2, OUTPUT); // red led
pinMode(3, OUTPUT); // yellow led
pinMode(4, OUTPUT); // green led
}
void loop()
{
int s = analogRead(A0); //take a sample
Serial.print(s); Serial.print(" - ");
if(s >= 1000) {
Serial.println("Sensor is not in the Soil or DISCONNECTED");
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
}
if(s < 1000 && s >= 600) {
Serial.println("Soil is DRY");
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
}
if(s < 600 && s >= 370) {
Serial.println("Soil is HUMID");
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
}
if(s < 370) {
Serial.println("Sensor in WATER");
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
}
delay(50);
}
https://www.himix.lt/arduino/arduino-and-soil-moisture-sensor-yl-69/
https://learn.sparkfun.com/tutorials/soil-moisture-sensor-hookup-guide/all
https://e-elektronic.com/arduino-tutorial-20-sensor-de-humedad-de-suelo/
https://randomnerdtutorials.com/guide-for-soil-moisture-sensor-yl-69-or-hl-69-with-the-arduino/
https://randomnerdtutorials.com/guide-for-soil-moisture-sensor-yl-69-or-hl-69-with-the-arduino/
Xianan Kapazitiver analoger Bodenfeuchtesensor (Arduino-kompatibel), korrosionsbeständig/mit den Echtzeit-Bodenfeuchtedaten/ANWENDUNGEN Garten- & Landwirtschaftserkennung Intelligente Landwirtscha
von
Xianan
CQRobot Capacitive Analog Soil Moisture Sensor(Arduino Compatible)
AZDelivery Bodenfeuchtesensor Hygrometer Modul V1.2 kapazitiv für Arduino
Trotz allen Versuchen halten die Sensoren nicht lange durch. Komisch ist, dass sie 2-3 Wochen voll unter Wasser im Testbehälter ohne Probleme bestehen. Wenn sie dann in den Blumenkübel kommen gehen die Sensoren innerhalb weniger Tage kaputt. Manche liefern überhaupt keinen Wert mehr und machen bringen völiig willkürliche Werte. Ich könnte mir vorstellen, dass Wasser mit Bluemenerde irgendwie den Sensor angreift (PHP-Wert).
-
Mit dem kapazitiven Sense-Prinzip wird die Bodenfeuchte erfasst. Arduino / Raspberry Pi kompatibel.
-
Mit dem kapazitiven Sense-Prinzip wird die Bodenfeuchte erfasst. Arduino / Raspberry Pi kompatibel.
-
Verlängern Sie das Arbeitsleben erheblich.
-
Sensor-Regler-Chip, Unterstützung 3.3 ~ 5.5V Weitspannung Arbeitsumgebung, was bedeutet, dass sogar in einem 3.3V Arduino Hauptplatine kann es auch funktionieren.
-
Iconic Robot-Gravity-Schnittstelle gewährleistet Kompatibilität Schnittstelle kann direkt an Gavity IO-Erweiterungskarten angeschlossen werden.
PRODUKTBESCHREIBUNG
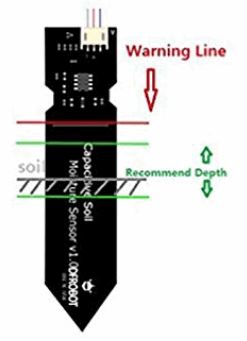
Unser Bodenfeuchtesensor misst die Bodenfeuchte durch kapazitive Messung und nicht durch resistive Sensoren wie andere Sensoren auf dem Markt. Es ist aus korrosionsbeständigem Material hergestellt, was ihm eine ausgezeichnete
Lebensdauer verleiht.
Fügen Sie es in den Boden um Ihre Pflanzen herum ein und beeindrucken Sie Ihre Freunde mit Echtzeitdaten zur Bodenfeuchtigkeit!
Dieses Modul enthält einen integrierten Spannungsregler, der einen Betriebsspannungsbereich von 3,3 bis 5,5 V ermöglicht. Es ist perfekt für Niederspannungs-MCUs, sowohl 3,3 V als auch 5 V. Um mit einem Raspberry Pi kompatibel zu sein, wird ein ADC-Konverter benötigt.
Dieser Sensor ist kompatibel mit unserer 3-Pin "Gravity" -Schnittstelle, die direkt mit dem Gravity I / O-Erweiterungsschild verbunden werden kann.
TFEATUREN
- Unterstützt Schwerkraft 3-Pin-Schnittstelle
- Analogausgang
ANWENDUNGEN
- Gartenarbeit & Landwirtschaft
- Feuchtigkeitserkennung
- Intelligente Landwirtschaft
SPEZIFIKATION
- Betriebsspannung: 3,3 V / DC bis 5,5 V / DC
- Ausgangsspannung: 0 bis 3,0 V / DC
- Schnittstelle: PH2.0 bis 3P
- Abmessung: 98 mm * 23 mm (3,86 in * 0,905 in)
- Gewicht: 15g
Verteilerliste
1 * Kapazitiver Bodenfeuchtesensor
1 * Kabel
VERTEILERLISTE
1 * CD Treiber
1 * DB9 zu 5P Konverter
1 * USB zu RS422 / RS485 Konverter
-
✔️ Mit diesem kapazitiven Bodenfeuchtigkeitssensor / Hygrometer können Sie auf einfache Weise die Feuchtigkeit von Pflanzen messen und detektieren, wann die Pflanze gegossen werden muss.
-
✔️ Unser AZDelivery Bodenfeuchte Sensor Modul hat einen integrierten Verstärker, somit kann er direkt an einen analogen Eingang von einem Arduino angeschlossen werden.
-
✔️ Die Messsonde wird in das Erdreich gesteckt und misst da die Kapazität der Erde, die sich mit der Feuchtigkeit verändert.
-
✔️ Im Vergleich zu seinem Vorgänger hat unser kapazitiver Bodenfeuchtigkeitssensor, oder auch Capacitive Soil Moisture Sensor genannt, keinen Verschleiß oder Korrosion.
https://www.amazon.de/gp/product/B07898KJ8J?ref=em_1p_6_ti&ref_=pe_19525161_399068351
https://www.amazon.de/AZDelivery-Bodenfeuchtesensor-Hygrometer-kapazitiv-Arduino/dp/B07HJ6N1S4/ref=pd_sbs_86_1/260-8084343-8991432?_encoding=UTF8&pd_rd_i=B07HJ6N1S4&pd_rd_r=381dffe6-38b9-4e80-a802-5cc27c9cd567&pd_rd_w=cVCRz&pd_rd_wg=1YIXF&pf_rd_p=74d946ea-18de-4443-bed6-d8837f922070&pf_rd_r=S24PXCRQM9JB0WFD8FHD&psc=1&refRID=S24PXCRQM9JB0WFD8FHD
U.S. Solid 1" G 12 V DC Messing Magnetventil Direktgesteuert für Wasser Luft Gas Öl NC Brass Solenoid Valve
Das Magnetventil USS2-SV00003 ist ein Halb-direktes gesteuert und stromlos geschlossen Magnetventil, mit G 1" Innengewinde einlass-auslass und Viton Dichtung (Wärme- und ölbeständig).
Passend für Heißes oder kaltes Wasser, Luft, sehr niedrigviskose Flüssigkeiten, Benzin, Kerosin oder Dieselkraftstoff, etc.
Passend für Verwendung draussen.
Nicht passend für Verwendung Unterwasser.
U.S. Solid Marke Magnetventil, Industrial Grade Produkte.
Körper: Messing; DC 12 V; Einlass-Auslass Gewindegröße: G 1" Innengewinde; Orifice: 25 mm; Typ: Stromlos Geschlossen N/C.
Dichtungswerkstoff: Viton; Schutzart: IP65; Für: Wasser, Luft, Gas, Öl, Diesel, kerosine, etc.
Die Installation ist einfach zu bedienen.
Der Pfeil zeigt die Strömungsrichtung.(Bitte horizontale Montage!!)
Kann nicht in starker Säure, starker Base, Abwasser, Industriegas und anderen Medien mit vielen Verunreinigungen verwendet werden.
Körper: Messing
Dichtungswerkstoff: Viton
Nennspannung: DC 12V
Strom: 1.667 A
Nennleistung: 20 W
Typ:Stromlos Geschlossen N/C, Halb-direktes Hebeventil
Schutzart: IP 65
Temperaturbereich: -10 ℃ bis +120 ℃
Passend für Heißes oder kaltes Wasser, Luft, Öle, sehr niedrigviskose Flüssigkeiten (<20 cst), Kohlenwasserstoffe, Benzin, Kerosin oder Dieselkraftstoff, etc.
Einlass-Auslass Gewindegröße: G 1" Innengewinde
Orifice: 25 mm
Durchflussleistung: 12 Gallone pro Minute (GPM) des Wassers bei 60 °F mit einem Druck Tropfen 1 PSI (12 CV).
Operativ Druckbereich: 0 - 7 Bar(0 - 101psi) (Für: Wasser, Luft, Gas); 0 - 5 Bar(0 - 72 psi) (Für: Öl)
U.S. Solid Ventile folgen British Standard Pipe Thread (BSPT).
Wir empfehlen die Verwendung von Teflonband, um die Abdichtung des Gewindes sicherzustellen. wie in FIGURE 2 gezeigt.
Es eignet sich für Flüssigkeiten, Gase und sogar für Hochvakuum.
Alle Magnetventile benötigen zum Betätigen etwas Druck.
Dies gilt insbesondere für vorgesteuerte oder indirekt betätigte Ventile.
Alle Magnetventile benötigen zum Betätigen etwas Druck. Dies gilt insbesondere für vorgesteuerte oder indirekt betätigte Ventile.
Für Ventile mit 2 Drähten, Das Ventil wird betätigt, unabhängig davon, an welcher Klemme jeder Draht angeschlossen ist(+ oder -).
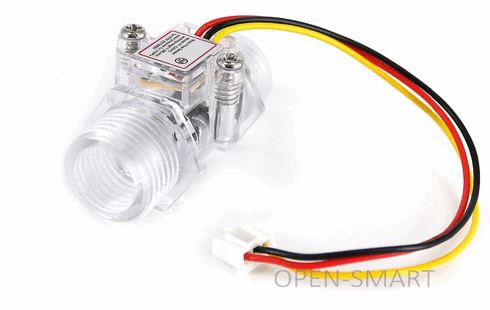
Wasser Durchfluss Sensor Turbine
MagiDeal G3/4 Gewinde Wasser Halle Kupfer Wasserablaufsteuerung Sensorschalter Durchflußmesser
STK0114009505
1-30L / Min Wasserdurchflusssensor Transparente Durchflussmesser Halle Wasserkontrolle
https://es.aliexpress.com/item/32784530232.html
sourcingmap® G1/2" 66mm Hall Effekt flüssig Wasser Sensor Schalter Durchflussmesser 1-30L/min de
-
Kupfer Material, kleine Größe, einfach zu installieren.
-
Der Wasser Durchflusssensor gilt für Warmwasserbereiter und eignet sich als Strömungswächter.
-
Max. Wasserdruck: 1,75MPa, Flussbereich: 1-30 L/min.
-
Stabile, hohe Temperatur, niedrige Wasserdruck Start, sicher.
Beschreibung:
Kann Wasserwärmer, Kreditkarte Maschinen, Wasserautomaten, Durchflussmessung Gerät verwenden für.
Lght Gewicht, geringe Größe, einfach zu installieren.
Durable tragbar, langlebig, hohe und niedrige Temperaturen können verwendet werden,
Dichtring mit der oberen und unteren Kraft Struktur nie Lecks
Gewindeanschluss: G3 / 4
Spezifikation:
Arbeitsfluss Bewertung: 1-30L / min
Nennspannung: DC5-15V
Wasserdruckbeständigkeit:> 1.75MPa
Betriebsspannungsbereich: DC5 ~ 15V
Isolationswiderstand:> 100MOhm
Strömungsimpulseigenschaften: (8.1Q-3) Q = L / min ± 10%
Ausgangs hohe Puls:> DC 4.7V (DC-Eingangsspannung 5V)
Material: Kupfer
Farbe: Gold
https://www.amazon.de/gp/product/B01LW6PVUX/ref=pe_19525161_399068351_em_1p_4_im
Schwimmerschalter
Wasser-Schwimmerschalter
https://de.wikipedia.org/wiki/Schwimmerschalter
50 der wichtigsten Raspberry Pi Sensoren und Module
https://tutorials-raspberrypi.de/raspberry-pi-sensoren-uebersicht-die-50-wichtigsten-module/
https://www.bastelgarage.ch/sensoren-fur-arduino
SENSOREN
Mikrowellen-Sensor
http://www.patent-de.com/20031113/DE10306194A1.html
Zusammenfassung
Dargestellt und beschrieben ist ein Mikrowellen-Sensor mit einem selbstmischenden Oszillator (1), mit einer Sende- und Empfangsantenne (2), mit einer Impedanz (3), die zwischen die Strom- bzw. Spannungsversorgung (4) und den Oszillator (2) geschaltet ist, und mit einer Auswerteschaltung (5), wobei der selbstmischende Oszillator (2) sowohl das Sendesignal erzeugt als auch das Sendesignal mit dem Empfangssignal mischt und das niederfrequente Mischprodukt (Doppler-Signal) an der Impedanz (3) abgegriffen und der Auswerteschaltung (5) zugeführt wird.
Der Mikrowellen-Sensor weist dadurch nur einen geringeren Energieverbrauch auf, wobei der Mikrowellen-Sensor auch kostengünstig herstellbar ist, daß der selbstmischende
Oszillator (2) als Gegentaktoszillator mit zwei Transistoren (6, 7) ausgebildet ist.
Beschreibung
Die Erfindung betrifft einen Mikrowellen-Sensor mit einer Strom- bzw. Spannungsversorgung, mit einem selbstmischenden Oszillator, mit einer Impedanz, die zwischen die Strom- bzw. Spannungsversorgung und den Oszillator geschaltet ist, mit einer Sende- und Empfangsantenne und mit einer Auswerteschaltung, wobei der selbstmischende Oszillator sowohl das Sendesignal erzeugt als auch das Sendesignal mit dem Empfangssignal mischt und das niederfrequente Mischprodukt an der Impedanz abgegriffen und der Auswerteschaltung zugeführt wird.
Bei einem ersten Typ von Mikrowellen-Sensoren der zuvor beschriebenen Art wird die Bewegung eines Gegenstandes in einem zu überwachenden Bereich dadurch festgestellt, daß der sogenannte Doppler-Effekt ausgewertet wird.
Ein von einem Sender ausgestrahltes Sendesignal mit einer Frequenz f1 wird von einem sich im zu überwachenden Bereich bewegenden Objekt reflektiert.
Ein Teil des reflektierten Signals trifft als Empfangssignal mit der Frequenz f2 auf den Empfänger.
In einem geeignetem Mischer wird das Empfangssignal mit dem Sendesignal gemischt und anschließend der Anteil des Mischprodukts mit der Doppler-Frequenz fD ausgewertet.
Für die Doppler-Frequenz fD gelten dabei folgende Gleichungen:
wobei mit c0 die Lichtgeschwindigkeit und mit vr die Radialgeschwindigkeit des sich bewegenden Objekts bezeichnet ist.
Aus der gemessenen Doppler-Frequenz f0 kann somit entweder die Radialgeschwindigkeit vr des sich bewegenden Objekts gemessen werden oder, wenn der Mikrowellen-Sensor nur zur Überwachung eines Raumes oder eines bestimmten Bereiches dient, der Eintritt eines Objekts in den zu überwachenden Raum bzw. Bereich festgestellt werden.
Ein derartiger, den Doppler-Effekt auswertender Mikrowellen-Sensor - der häufig auch als Doppler-Sensor bezeichnet wird - kann somit als Bewegungsmelder für unterschiedlichste Anwendungen eingesetzt werden.
Bei einem zweiten Typ von Mikrowellen-Sensoren der zuvor beschriebenen Art zur Detektion eines bewegten oder unbewegten Gegenstandes in einem zu überwachenden Bereich wird ein frequenzmoduliertes Sendesignal mit einer Frequenz f1(t) von einem Sender ausgestrahlte.
Das Modulationssignal wird dabei von einem geeigneten Modulationsgenerator erzeugt, wobei die Veränderung der Frequenz f1(t) des Sendesignals linear, sinusförmig oder nach einer anderen Zeitfunktion erfolgen kann.
Dieses Radarverfahren wird als Dauerstrichradar mit Frequenzmodulation bzw. als FMCW-Radar (FMCW = Frequency Modulated Continuous Wave) bezeichnet.
Auch hier wird das Sendesignal mit der Frequenz f1(k) von einem sich im zu überwachenden Bereich befindenden Objekt reflektiert.
Ein Teil des reflektierten Signals trifft nach der Zeitdauer Δt als Empfangssignal mit der Frequenz f1(t0) auf den Empfänger.
Zu diesem Zeitpunkt hat das Sendesignal bereits die Frequenz f1(t0 + Δt).
Das Empfangssignal läuft somit in seiner Frequenz derjenigen des Sendesignals hinterher.
In einem geeignetem Mischer wird das Empfangssignal mit dem Sendesignal gemischt und anschließend der Anteil des Mischprodukts mit der Frequenz fZF ausgewertet.
Der in Rede stehende Mikrowellen-Sensor kann sowohl als Doppler-Sensor als auch als FMCW-Sensor verwendet werden.
Dabei kann die Frequenz des Senders je nach Anwendungsbeispiel zwischen 60 MHz und 60 GHz liegen und somit auch etwas unterhalb des eigentlichen Mikrowellenbereichs liegen, der normalerweise von 300 MHz bis 300 GHz reicht.
Genau genommen handelt es sich bei dem in Rede stehenden Sensor somit um einen Radio- bzw. Mikrowellensensor.
Eingangs ist ausgeführt worden, daß der Mikrowellen-Sensor einen selbstmischenden Oszillator und eine Sende- und Empfangsantenne aufweist.
Ein selbstmischender Oszillator, der auch als selbstschwingender Mischer bezeichnet werden kann, ist ein Bauteil, das sowohl als Oszillator als auch als Mischer eingesetzt wird.
Zum einen wird also durch den selbstmischenden Oszillator das Sendesignal erzeugt, zum anderen wird in dem selbstmischenden Oszillator - der dann als selbstschwingender Mischer arbeitet - das Empfangssignal mit dem Sendesignal gemischt.
Unter einer Sende- und Empfangsantenne soll im Rahmen dieser Anmeldung ein Bauteil verstanden werden, das gleichzeitig als Sendeantenne und als Empfangsantenne verwendet wird.
Ein derartiger Mikrowellen-Sensor, bei dem anstelle der vier Bauteile - Oszillator, Mischer, Sendeantenne und Empfangsantenne - nur die zuvor beschriebenen beiden Bauteile - selbstmischender Oszillator und Sende- und Empfangsantenne - verwendet werden, ist aus der DE 32 09 093 A1 und aus der DE 41 27 892 A1 bekannt.
Bei den bekannten Mikrowellen-Sensoren wird der selbstmischende Oszillator durch einen rückgekoppelten Feldeffekt-Transistor gebildet, in dessen Source-Drain-Stromkreis ein Widerstand zum Abgriff des Doppler-Signals vorgesehen ist.
Mit den bekannten Mikrowellen- Sensoren ist es bereits gelungen, eine Vorrichtung zur Raumüberwachung mittels Doppler-Radar zur Verfügung zu stellen, die nur relativ wenige Bauteile benötigt und daher sowohl kostensparend hergestellt werden kann als auch nur einen geringen Raumbedarf und ein geringes Gewicht aufweist.
Insbesondere wenn ein solcher Mikrowellen-Sensor als 2-Leiter-Gerät ausgebildet ist oder nur durch eine Batterie betrieben werden soll, besteht jedoch das Problem, daß die bekannten Mikrowellen-Sensoren einen zu großen Energieverbrauch aufweisen oder bei geringem Energieverbrauch eine zu geringe Sendeleistung haben.
Ein derartiger als 2-Leiter-Gerät ausgebildeter Mikrowellen-Sensor kann auch als Mikrowellen-Näherungsschalter bezeichnet werden.
Der vorliegenden Erfindung liegt daher die Aufgabe zugrunde, den eingangs beschriebenen Mikrowellen-Sensor derart zu verbessern, daß er einen geringeren Energieverbrauch aufweist und möglichst kostengünstig hergestellt werden kann.
Diese Aufgabe ist bei dem eingangs beschriebenen Mikrowellen-Sensor zunächst im wesentlichen dadurch gelöst, daß der selbstmischende Oszillator als Gegentaktoszillator mit zwei Transistoren ausgebildet ist.
Die Verwendung eines Gegentaktoszillators hat den Vorteil, daß dadurch eine höhere Leistung und ein besserer Wirkungsgrad erreichbar sind, so daß ein solcher Gegentaktoszillator bereits bei einer relativ niedrigen Spannung bzw. bei einem relativ geringem Strom gut anschwingt. Insbesondere ein symmetrisch aufgebauter Gegentaktoszillator ist im Vergleich zu den bekannten, als selbstmischende Oszillatoren verwendeten, Feldeffekt-Transistoren wesentlich schwingfreudiger, wobei zusätzlich auch weniger Oberschwingungen auftreten.
Die Sende- und Empfangsantenne wird vorteilhafter Weise durch eine die Frequenz des Oszillators bestimmende Streifenleitung gebildet.
Durch die Verwendung einer Streifenleitung als Sende- und Empfangsantenne, die Bestandteil des Gegentaktoszillators ist, ist es möglich, ein weiteres Bauteil einzusparen, da keine separate Sende- und Empfangsantenne mehr benötigt wird.
Daneben ist es jedoch auch möglich, als Sende- und Empfangsantenne eine Dipolantenne zu verwenden.
Gemäß einer bevorzugten Ausgestaltung des erfindungsgemäßen Mikrowellen-Sensors ist zur Einstellung bzw. Stabilisierung des Arbeitspunktes des Mikrowellen-Sensors eine Spannungsgegenkopplung mit mindestens einem Widerstand und mit einem Tiefpass realisiert.
Bei dem aus der DE 41 27 892 A1 bekannten Doppler-Sensor ist zur Stabilisierung des Arbeitspunktes des Transistors eine Stromgegenkopplung realisiert, wozu zwischen den Drain-Anschluß bzw. den Gate-Anschluß des Feldeffekt-Transistors und Masse jeweils eine Impedanz geschaltet ist.
Eine derartige Stromgegenkopplung zur Einstellung des Arbeitspunktes führt zum einen zu einem nicht gewünschten Querstrom, was den insgesamt benötigten Energiebedarf des Mikrowellen-Sensors erhöht.
Zum anderen besteht bei einer Arbeitspunkteinstellung mittels Stromgegenkopplung die Gefahr, daß durch die Gegenkopplung auch das Nutzsignal,
d.h. das Doppler-Signal "weggeregelt" oder zumindest geschwächt wird.
Dadurch, daß die Arbeitspunkteinstellung durch eine Spannungsgegenkopplung realisiert wird, wird zunächst ein ungewollter Querstrom vermieden.
Darüber hinaus wird durch den vorgesehenen Tiefpass sichergestellt, daß nur eine eventuelle Temperatur-Drift ausgeregelt, nicht jedoch das Doppler-Signal geschwächt wird. Hierzu wird der Tiefpass so eingestellt, daß die Arbeitspunktregelung langsamer als die niedrigste zu erwartende Doppler-Frequenz fD bzw. die niedrigste Zwischenfrequenz fZF ist.
Bei einem Sendesignal mit einer Frequenz f1 von einigen Giga-Hertz, beispielsweise 2,5 GHz und einer Abstimmung des Mikrowellen-Sensors auf von Menschen ausgeübte Bewegungen, beispielsweise auf die Annäherung einer Hand an einen Türgriff, beträgt beispielsweise die Doppler-Frequenz fD zwischen 10 und 50 Hz, so daß die Grenzfrequenz des Tiefpasses entsprechend kleiner als 10 Hz gewählt werden muß.
Vorzugsweise beträgt die Grenzfrequenz des Tiefpasses etwa 1/3 der niedrigsten erwarteten Doppler-Frequenz fD bzw. die niedrigste Zwischenfrequenz fZF.
Bei einer derartigen Einstellung bzw. Stabilisierung des Arbeitspunktes werden nur sehr wenige Bauteile benötigt. Insbesondere kann der Widerstand, der zur Spannungsgegenkopplung benutzt wird, gleichzeitig auch Bestandteil des Tiefpasses sein.
Dann sind für die Arbeitspunkteregelung nur ein Widerstand und ein, vorzugsweise zwei Kondensatoren erforderlich.
Bei einer alternativen Ausgestaltung des erfindungsgemäßen Mikrowellen- Sensors erfolgt die Stabilisierung bzw. die Einstellung des Arbeitspunktes mit Hilfe einer Stromregelung mit mindestens einem Tiefpaß.
Durch den Tiefpass wird wiederum sichergestellt, daß nur eine eventuelle Temperatur-Drift ausgeregelt, nicht jedoch das Doppler-Signal bzw. das Zwischensignal geschwächt wird.
Die Stromregelung erfolgt dabei über eine Veränderung des Basisstroms der Oszillatortransistoren des Gegentaktoszillators.
Dabei kann der Anschluß der Arbeitspunktregelung direkt an den Basen der Oszillatortransistoren oder am Mittenanschluß der Streifenleitung erfolgen.
Gemäß einer weiteren Ausgestaltung der Erfindung erfolgt die Regelung des Arbeitspunktes mit Hilfe eines Komparators und eines Tiefpasses oder eines Integrators.
Als Komparator wird beispielsweise ein entsprechend beschalteter Operationsverstärker verwendet.
Auch eine derartige aufgebaute Regelung erfolgt mit einer Frequenz, die geringer ist als die kleinste erwartete Doppler- Frequenz fD. Da durch die Arbeitspunkteinstellung bzw. -regelung nur eine eventuell auftretende Temperatur-Drift der Transistoren kompensiert werden soll - die zu einem gegebenen Kollektorstrom gehörige Basis-Emitter- Spannung eines Transistors nimmt um ca. 2 mV je Grad Temperaturerhöhung ab - ist hierzu eine Arbeitspunktregelung mit einer Frequenz von nur einigen Hertz ausreichend.
Eingangs ist ausgeführt worden, daß der Mikrowellen-Sensor eine Impedanz aufweist, die zwischen die Strom bzw. Spannungsversorgung und den selbstmischenden Oszillator geschaltet ist, wobei das Doppler-Signal an der Impedanz abgegriffen und der Auswerteschaltung zugeführt wird.
Soll der erfindungsgemäße Mikrowellen-Sensor nur einen minimalen Stromverbrauch aufweisen und mit möglichst geringen Kosten und somit auch mit möglichst wenig Bauteilen realisiert werden, so kann die Impedanz einfach als ohmscher Widerstand ausgebildet sein.
Ein solcher Mikrowellen-Sensor eignet sich besonders für den Batteriebetrieb, da der Mikrowellen-Sensor dann nur einen Stromverbrauch von weniger als 0,5 mA aufweist. Aufgrund des sehr schwingfreudigen Gegentaktoszillators ist sogar ein noch geringerer Strom für den Betrieb des selbstmischenden Oszillators ausreichend.
Ein derartiger Mikrowellen-Sensor kann beispielsweise in einem Türgriff eines Kraftfahrzeuges integriert werden, wo der Mikrowellen-Sensor die Annäherung einer Hand an den Türgriff feststellt und beim Ansprechen einen Transponder zur Abfrage der Zugangsberechtigung aktiviert.
Ebenso ist ein derartiger Mikrowellen- Sensor als Näherungsschalter in Sanitäranlagen - WC-Spülungen oder Hände- Trockner - oder in Fußgängerampeln einsetzbar.
Mit einem derartigen, auf minimalen Energieverbrauch optimierten Mikrowellen-Sensor, der daneben auch nur sehr geringe Abmessungen aufweist, ist jedoch nur eine geringe Reichweite von einigen Zentimetern - bis etwa 10 bis 20 cm - realisierbar, so daß der Mikrowellen-Sensor auch nur einen entsprechend kleinen - bei den zuvor genannten Einsatzgebieten jedoch ausreichenden - Raumbereich überwachen kann.
Soll mit dem Mikrowellen-Sensor eine größere Reichweite erzielt werden, wobei dennoch der Energieverbrauch möglichst gering gehalten werden soll, so wird vorteilhafterweise eine Impedanz verwendet, die einen frequenzabhängigen Widerstandswert aufweist.
Die Impedanz ist dabei so ausgelegt, daß sie für die Gleichspannungs- bzw. Gleichstromversorgung des selbstmischenden Oszillators niederohmig ist, für das Doppler-Signal bzw. das Zwischensignal jedoch möglichst hochohmig ist.
Eine solche Impedanz kann beispielsweise durch eine Konstantstromquelle gebildet werden.
Die Verwendung einer Impedanz mit einem zuvor beschriebenen frequenzabhängigen Widerstandswert hat den Vorteil, daß zum einen durch die Niederohmigkeit für die Gleichstromversorgung den Transistoren des Gegentaktoszillators relativ viel Strom zugeführt werden kann, so daß eine relativ hohe Sendeleistung zur Verfügung steht.
Zum anderen hat eine solche Impedanz aufgrund ihrer Hochohmigkeit für das Doppler-Signal den Vorteil, daß eine hohe Verstärkung erreicht wird.
Eine derartige Impedanz kann auch durch eine Drossel, insbesondere eine elektronische Drossel, beispielsweise einen Gyrator, realisiert sein.
Ein Gyrator hat den Vorteil, daß er für die Gleichstromversorgung sehr niederohmig für die NF-Signale und die HF-Signale jedoch sehr hochohmig ist, was zu der gewünschten hohen Verstärkung des Nutzsignals führt.
Zur Vergrößerung der Frequenzstabilität des Gegentaktoszillators kann die Streifenleitung mit einem dielektrischen Resonator verbunden sein.
Ein solcher dielektrischer Resonator übernimmt dann aufgrund seiner höheren Güte die Frequenzführung des Gegentaktoszillators.
Die Verwendung eines dielektrischen Resonators ist insbesondere dann vorteilhaft, wenn der Mikrowellen- Sensor in unmittelbarer Nähe zu anderen elektronischen Geräten und Schaltungen eingesetzt werden soll, so daß sichergestellt werden muß, daß diese elektronischen Geräten und Schaltungen durch das abgestrahlte Sendesignal nicht beeinträchtigt werden.
Die Streifenleitung ist vorteilhafterweise als λ/2 (Lambda-Halbe) Mikrostreifenleitung ausgebildet.
Die Abstimmung der Länge der Mikrostreifenleitung auf die Frequenz f1 des Sendesignals hat den Vorteil, daß bei einer Wahl der Länge der Mikrostreifenleitung entsprechend der halben Wellenlänge des Sendesignals der Spannungsnullpunkt des sinusförmigen Sendesignals in der geometrischen Mitte der Mikrostreifenleitung liegt, wodurch der Anschluß für die Arbeitspunktregelung leicht realisierbar ist, insbesondere Drosseln zur Einkoppelung nicht erforderlich sind.
Zur Verbesserung der Richtcharakteristik der Streifenleitung weist diese eine Hinterkupferung auf, wodurch die Abstrahlcharakteristik der Streifenleitung etwa einem Rotationsellipsoid entspricht.
Grundsätzlich gibt es verschiedene Möglichkeiten, die Auswerteschaltung, der das Doppler-Signal zugeführt wird, auszugestalten.
Gemäß einer bevorzugten Ausgestaltung der Erfindung weist die Auswerteschaltung mindestens einen Verstärker, mindestens einen Bandpaß und mindestens einen Komparator auf.
Der Bandpaß ist dabei auf die zu erwartende Frequenz fD des Doppler-Signals im Bereich von 10 bis 40 Hz eingestellt, so daß durch den Bandpaß sowohl das Rauschen als auch ein 50 Hz Brummen unterdrückt werden kann.
Aufgrund der relativ geringen Frequenz fD des auszuwertenden Doppler-Signals weist der Verstärker, der vorteilhafterweise als zweistufiger Operationsverstärker ausgebildet ist, nur einen geringen Stromverbrauch auf.
Um ein möglichst schnelles Ansprechen des Mikrowellen-Sensors zu gewährleisten, ist der Komparator bevorzugt als Fenster-Komparator ausgebildet, so daß der Komparator zwei Schwellen, sowohl eine positive als auch eine negative Schwelle, aufweist.
Dadurch wird durch jede Bewegung eines Objekts innerhalb des überwachten Bereichs sofort ein Signal am Ausgang des Komparators erzeugt, unabhängig von der Richtung der Bewegung.
Die Verwendung einer Auswerteschaltung mit einem Fenster-Komparator hat darüber hinaus den Vorteil, daß der Fenster-Komparator so beschaltet werden kann, daß er ohne Ruhestrom arbeitet.
Nur bei Betätigung des Mikrowellen-Sensors, d. h. wenn sich ein Objekt im Überwachungsbereich des Mikrowellen-Sensors bewegt, fließt durch den Fenster-Komparator ein Laststrom.
Mit Hilfe eines Spannungsreglers, der zwischen die Strom- bzw. Spannungsversorgung und die Impedanz geschaltet ist und an dessen Ausgang ein Lastwiderstand angeschlossen ist, kann auf die Verwendung einer ansonsten aufwendigeren Endstufe verzichtet werden.
Wird der Mikrowellen-Sensor betätigt, so daß der Fenster-Komparator leitend wird und damit ein Laststrom über den Lastwiderstand fließt, so wird ein damit verbundener Spannungseinbruch von dem Spannungsregler durch einen entsprechenden Anstieg des Stromes sofort kompensiert.
Da der Lastwiderstand an den Ausgang des Spannungsreglers angeschlossen ist, ist der bei der Betätigung des Mikrowellen-Sensors fließende Strom genau definiert.
Im einzelnen gibt es nun eine Vielzahl von Möglichkeiten, den erfindungsgemäßen Mikrowellen- bzw. Radiowellen-Sensor auszugestalten und weiterzubilden.
Dazu wird verwiesen sowohl auf die dem Patentanspruch 1 nachgeordneten Patentansprüche als auch auf die Beschreibung bevorzugter Ausführungsbeispiele in Verbindung mit der Zeichnung. In der Zeichnung zeigen Fig. 1 ein Prinzipschaltbild eines Ausführungsbeispiels des erfindungsgemäßen Mikrowellen-Sensors,
Fig. 2a ein Prinzipschaltbild eines Teils des Mikrowellen-Sensors gemäß Fig. 1,
Fig. 2b ein Prinzipschaltbild eines Teils eines alternativen Ausführungsbeispiels des erfindungsgemäßen Mikrowellen-Sensors,
Fig. 3 ein Blockschaltbild eines Teils des Mikrowellen-Sensors gemäß Fig. 2b,
Fig. 4 ein Blockschaltbild eines Mikrowellenmoduls des Mikrowellen- Sensors und
Fig. 5 einen Aufbau eines Mikrowellenmoduls gemäß Fig. 4.
Gemäß dem in Fig. 1 dargestellte Prinzipschaltbild weist der erfindungsgemäße Mikrowellen-Sensor eine Strom- bzw. Spannungsversorgung 1, einen selbstmischenden Oszillator 2, eine Impedanz 3, die zwischen die Strom- bzw. Spannungsversorgung 1 und den selbstmischenden Oszillator 2 geschaltet ist, eine Sende- und Empfangsantenne 4 und eine Auswerteschaltung 5 auf. Der selbstmischende Oszillator 2, der sowohl das Sendesignal erzeugt als auch das Sendesignal mit dem Empfangssignal mischt, bildet zusammen mit der Sende- und Empfangsantenne 4 das hochfrequente Mikrowellenmodul 6, von dem in Fig. 4 ein Blockschaltbild und in Fig. 5 eine Layout-Schaltung dargestellt ist.
Die Fig. 4 und 5 zeigen, daß der selbstmischende Oszillator 2 als symmetrischer Gegentaktoszillator mit zwei Bipolar-Transistoren 7, 8 ausgebildet ist und die Sende- und Empfangsantenne 4 durch eine Streifenleitung 9 gebildet wird. Die Streifenleitung 9, die als λ/2-Mikrostreifenleitung ausgebildet ist, ist mit ihren beiden Enden jeweils mit dem Basisanschluß 15 bzw. 16 der beiden Bipolar-Transistoren 7, 8 verbunden.
Bei dem in den Fig. 4 und S dargestellten Mikrowellenmodul 6, das so aufgebaut und ausgebildet ist, daß der Mikrowellen-Sensor nur einen minimalen Stromverbrauch aufweist, ist zur Einstellung bzw. Stabilisierung des Arbeitspunktes der Transistoren 7, 8 eine Spannungsgegenkopplung 10 mit nur einem Widerstand 11 und zwei Tiefpässen 12 realisiert.
Dabei wird für die beiden Tiefpässe 12 der beiden Transistoren 7 und 8 der gleiche Widerstand 11 benutzt, der auch zur Spannungsgegenkopplung verwendet wird.
Nur angedeutet ist in Fig. 1 eine alternative Ausgestaltung der Spannungsgegenkopplung 10, die aus einem Spannungskomparator 13 und einem Integrator 14 besteht.
Der Integrator 14 dient dabei, ebenso wie die in den Fig. 4 und 5 dargestellten RC-Glieder, als Tiefpaß, mit einer Grenzfrequenz unterhalb der Doppler-Frequenz fD.
Die in Fig. 1 ebenfalls nur schematisch dargestellte Impedanz 3 kann durch einen ohmschen Widerstand, eine Konstantstromquelle 3' oder durch eine Gyrator 3" realisiert sein.
Bevorzugt wird bei der strom- und bauteiloptimierten Ausgestaltung des Mikrowellen-Sensors, der ein Mikrowellenmodul 6 gemäß den Fig. 4 bzw. 5 aufweist, lediglich ein ohmscher Widerstand als Impedanz 3 verwendet.
Dagegen wird dann, wenn der Mikrowellen-Sensor eine etwas größere Reichweite aufweisen soll, die Impedanz 3 durch eine Konstantstromquelle 3' oder durch einen Gyrator 3" realisiert.
Wie in Fig. 2 zu erkennen ist, erfolgt dann, wenn als Impedanz eine Konstantstromquelle 3' verwendet wird (Fig. 2a) der Abgriff der Arbeitspunktregelung, d. h. der Spannungsgegenkopplung 10, oberhalb des Oszillators 2, während dann, wenn als Impedanz ein Gyrator 3" verwendet wird (Fig. 2b) der Abgriff der Stromregelung 10' unterhalb der Oszillators 2 erfolgt.
Die Stromregelung 10' besteht dabei aus einem Verstärker 13' und einem Tiefpass 14'.
Die nur in Fig. 1 schematisch dargestellte Auswerteschaltung 5 besteht aus einem Verstärker 17, einem Bandpaß 18 und einem Fenster-Komparator 19.
Der Verstärker 17 kann dabei als zweistufiger Operationsverstärker ausgebildet sein, wobei der Bandpaß 18 dann durch eine RC-Gegenkopplung der Operationsverstärker realisiert ist.
Die Schaltung des Mikrowellen-Sensors weist darüber hinaus noch einen Spannungsregler 20 auf, an dessen Ausgang 21 ein Lastwiderstand 22 angeschlossen ist.
Wird der Mikrowellen-Sensor betätigt, d. h. bewegt sich ein Objekt in den überwachten Bereich, so wird der Fenster- Komparator 19 leitend, so daß ein Laststrom über den Lastwiderstand 22 fließt.
Der damit verbundene Spannungseinbruch wird durch den Spannungsregler 20 sofort durch einen entsprechenden Anstieg des Stromes kompensiert.
Der Spannungsregler 20 sorgt somit für eine konstante Betriebsspannung des Mikrowellen-Sensors, wobei bei einem in Fig. 1 dargestellten 2-Leiter Mikrowellen-Sensor das Ausgangssignal an der Strom- bzw. Spannungsversorgung 1 in Form zweier unterschiedlicher Ströme, Ruhrstrom oder erhöhter Strom bei betätigtem Mikrowellen-Sensor, anliegt. Schließlich ist in Fig. 1 noch eine Schutzschaltung 23 dargestellt, die aus einem Transistor als Vorregler und aus Dioden als Überspannungs- und Verpolschutz besteht.
Wie in den Fig. 2, 3 und 4 dargestellt, ist der Oszillator 2 über ein Filter- und Anpaßnetzwerk 24 mit Masse verbunden, um eine möglichst hohe Verstärkung des Nutzsignal zu erreichen.
Das Filter- und Anpaßnetzwerk 24 enthält dabei insbesondere jeweils eine Induktivität und einen dazu in Reihe geschalteten niederohmigen Widerstand pro Emitterzweig.
Um das Mikrowellenmodul 6 möglichst einfach und mit möglichst wenig Bauteilen realisieren zu können, sind die Kollektoren 25, 26 der Transistoren 7, 8 durch fächerförmige Dreiecke 27 als Abblockkondensatoren gegen eine Hinterkupferung des Mikrowellenmoduls 6 abgeblockt.
Durch die Hinterkupferung des Mikrowellenmoduls 6 wird eine verbesserte Abstrahlcharakteristik der Streifenleitung 9 erreicht, wozu auch die freie Fläche auf der Oberseite 28 des Mikrowellenmoduls 6 - insbesondere benachbart zur Streifenleitung 9 - mit Kupfer ausgefüllt sein kann.
Über Kontaktierungspunkte 29 ist die Oberfläche 28 des Mikrowellenmoduls 6 mit der Hinterkupferung auf der Unterseite verbunden.
Wie darüber hinaus noch aus Fig. 5 erkennbar ist, sind die Hochfrequenz-Drosseln durch mäanderförmige Leitungen 30 realisiert.
Durch diese Maßnahmen können somit zusätzliche Bauteile wie Kondensatoren oder Hochfrequenz-Drosseln entfallen oder besonders einfach realisiert werden.
Anspruch[de]
1. Mikrowellen-Sensor mit einer Strom- bzw. Spannungsversorgung (1), mit einem selbstmischenden Oszillator (2), mit einer Impedanz (3), die zwischen die Strom- bzw. Spannungsversorgung (1) und den Oszillator (2) geschaltet ist, mit einer Sende- und Empfangsantenne (4) und mit einer Auswerteschaltung (5), wobei der selbstmischende Oszillator (1) sowohl das Sendesignal erzeugt als auch das Sendesignal mit dem Empfangssignal mischt und das niederfrequente Mischprodukt an der Impedanz (3) abgegriffen und der Auswerteschaltung (5) zugeführt wird, dadurch gekennzeichnet, daß der selbstmischende Oszillator (2) als Gegentaktoszillator mit zwei Transistoren (7, 8) ausgebildet ist.
2. Mikrowellen-Sensor nach Anspruch 1, dadurch gekennzeichnet, daß die Sende- und Empfangsantenne (4) durch eine die Frequenz des Gegentaktoszillators bestimmende Streifenleitung (9) gebildet ist.
3. Mikrowellen-Sensor nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß zur Einstellung bzw. Stabilisierung des Arbeitspunktes eine Spannungsgegenkopplung (10) mit mindestens einem Widerstand (11) und mit einem Tiefpaß (12) realisiert ist.
4. Mikrowellen-Sensor nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß zur Einstellung bzw. Stabilisierung des Arbeitspunktes eine Stromregelung (10') mit mindestens einem Widerstand (11) und mit einem Tiefpaß (14') realisiert ist.
5. Mikrowellen-Sensor nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß ein Komparator (13) und ein Tiefpaß oder ein Integrator (14) zur Stabilisierung des Arbeitspunktes vorgesehen sind.
6. Mikrowellen-Sensor nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, daß die Impedanz (3) als ohmscher Widerstand ausgebildet ist.
7. Mikrowellen-Sensor nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, daß die Impedanz (3) einen frequenzabhängigen Widerstandswert aufweist.
8. Mikrowellen-Sensor nach Anspruch 7, dadurch gekennzeichnet, daß die Impedanz (3) als Konstantstromquelle (3') ausgebildet ist.
9. Mikrowellen-Sensor nach Anspruch 7, dadurch gekennzeichnet, daß die Impedanz (3) als elektronische Drossel, insbesondere als Gyrator (3") ausgebildet ist.
10. Mikrowellen-Sensor nach einem der Ansprüche 2 bis 9, dadurch gekennzeichnet, daß als Transistoren (7, 8) Bipolar-Transistoren verwendet sind, und die Streifenleitung (9) mit dem Basisanschluß (15, 16) der beiden Bipolar- Transistoren (7, 8) verbunden ist.
11. Mikrowellen-Sensor nach einem der Ansprüche 2 bis 10, dadurch gekennzeichnet, daß die Streifenleitung (9) mit einem dielektrischen Resonator verbunden ist.
12. Mikrowellen-Sensor nach einem der Ansprüche 2 bis 11, dadurch gekennzeichnet, daß die Streifenleitung (9) als λ/2-Mikrostreifenleitung ausgebildet ist und eine Hinterkupferung aufweist.
13. Mikrowellen-Sensor nach einem der Ansprüche 1 bis 12, dadurch gekennzeichnet, daß die Auswerteschaltung (5) mindestens einen Verstärker (17), mindestens einen Bandpaß (18) und mindestens einen Komparator, insbesondere einen Fenster-Komparator (19), aufweist.
14. Mikrowellen-Sensor nach Anspruch 13, dadurch gekennzeichnet, daß der Verstärker (17) als zweistufiger Operationsverstärker mit jeweils einer RC- Gegenkopplung ausgebildet ist.
15. Mikrowellen-Sensor nach Anspruch 13 oder 14, dadurch gekennzeichnet, daß der Fenster-Komparator (19) im Ruhezustand stromlos ist.
16. Mikrowellen-Sensor nach einem der Ansprüche 1 bis 15, dadurch gekennzeichnet, daß ein Spannungsregler (20) vorgesehen ist, der Spannungsregler (20) zwischen die Strom- bzw. Spannungsversorgung (4) und die Impedanz (3) geschaltet ist und an den Ausgang (21) des Spannungsreglers (20) ein Lastwiderstand (22) angeschlossen sind.
DIN A4 ausdrucken
********************************************************I*
Impressum: Fritz Prenninger, Haidestr. 11A, A-4600 Wels, Ober-Österreich, mailto:
[email protected]
ENDE