|
http://sites.schaltungen.at/elektronik/avr-mikrocontroller
Wels, am 2014-05-20BITTE nützen Sie doch rechts OBEN das Suchfeld [ ] [ Diese Site durchsuchen]DIN A3 oder DIN A4 quer ausdrucken
*******************************************************************************I** DIN A4 ausdrucken (Heftrand 15mm / 5mm) siehe http://sites.schaltungen.at/drucker/sites-prenninger
********************************************************I*
~015_b_PrennIng-a_elektronik-avr-mikrocontroller (xx Seiten)_1a.pdf
AVR-Mikrocontroller AVR http://www.mikrocontroller.net/articles/ARM AVR-Tutorial http://www.mikrocontroller.net/articles/AVR-Tutorial Aufbau des Tutorials
********************************************************* Über AVR-Mikrocontroller http://www.rowalt.de/mc/index.htm Atmel AVR http://de.wikipedia.org/wiki/Atmel_AVR
RN-Wissen Tutorial
www.roboternetz.de AVR-Einstieg leicht gemachtATmega16 und ATmega32http://www.rn-wissen.de/index.php/AVR-Einstieg_leicht_gemacht ********************************************************* Dr. ClausKühnelProgrammieren der AVR RISC Microcontroller mit BASCOM-AVR3. bearbeitete und erweiterte Auflage,ISBN: 3-907857-14-4, 444 Seiten, € 34,95 http://www.ckuehnel.ch/ckskript/PDF/Inhalt%20BASCOM-AVR%203.pdf Mikrocontroller AVR ARDUINO http://de.wikipedia.org/wiki/Arduino-Plattform http://www.arduino.cc/ Arduino mit BASCOM-AVR programmieren. Hinweise hierzu sind unter http://bascom-forum.de/index.php?topic=4868.0 zu finden. http://www.ckuehnel.ch/ ********************************************************* Arduino Kochbuch Michael Magolis, O'REILLY-Verlag in www.schaltungen.at x704_d_O'REILLY-x_Leseprobe- Arduino Kochbuch – Michael Mangolis (117 Seiten)_2a.doc *********************************************************
AVR Mikrocontroller-Kochbuch
Entwurf und Programmierung praktischer Anwendungen
Lukas Salzburger, Irmtraut Meister
ISBN: 3-645-25126-6 , 6,3 MB
336 Seiten, Softcover
Rezept auswählen, Zutaten zusammenstellen - und genießen. Nach genau diesem Konzept finden Sie in diesem Buch alles, um Ihr „Mikrocontroller-Süppchen" zu kochen: Von den ersten Programmierschritten über Messungen unterschiedlichster Größen bis zum Erzeugen von Signalen und zur Kommunikation über diverse Schnittstellen. Entdecken Sie die schier endlosen Möglichkeiten der Mikrocontroller! Mit nur wenig Programmieraufwand verwirklichen Sie im Handumdrehen Ihre Ideen. Schritt für Schritt begleitet dieses Buch Sie von den allgemeinen Grundlagen zur praktischen Umsetzung und erleichtert so auch komplexe Programmierungen. Am Beispiel des AVR®-Mikrocontrollers von Atmel® lernen Sie das Potenzial von Mikrocontrollern kennen und können sich dadurch auch leicht in „fremde" Mikrocontroller einarbeiten. Für Einsteiger bietet das Buch auch Hinweise zur Programmierung von Bitoperationen und einfache Codegerüste - so bleiben keine Fragen offen.
http://www.franzis.de/elektronik/simulation-computer/avr-mikrocontroller-kochbuch ********************************************************* Kleiner Bascom AVR Kurs Im Loetstelle-Forum wurde von "passat2001" gefragt, ob man eine einfacheanaloge Schaltung auch so umsetzen könne, damit man diese später übereinen Computer anpassen/programmieren kann. Es hat sich einfach so ergeben. :-) Irgendwie ist aus dieser Frage ein kleiner Kurs geworden, der dieAVR Mikrocontroller und deren Programmierung mit Bascomerklären soll. Es handelt sich um den Foren-Thread "Digitale Lösung für Schaltungen / Problem?".
Da immer wieder Fragen auftauchten und deren Antworten sich im gleichenThread befinden, ist der Thread inzwischen ein wenig unübersichtlich geworden. Deshalb versuche ich hier die wichtigsten Beiträge zusammenzufassen. Hinweis
Ich bitte dich, Fragen zu diesem Kurs, direkt im oben genanntenForen-Thread "Digitale Lösung für Schaltungen / Problem?"zu stellen, und nicht per Email an mich zu schicken.
Die Fragen und derenAntworten sind auch für Andere interessant.
Warum nur einem/einerhelfen, wenn mit gleichem Aufwand viel mehr Menschen etwas davon haben könnten?
Zweitens, wird es mir ansonsten einfach zu viel. Viele Fragen können auchvon anderen Forenteilnehmern beantwortet werden -- oft auch besser alsvon mir.
4AP der 4-Teile-AVR-Programmer http://halvar.at/elektronik/kleiner_bascom_avr_kurs/ ********************************************************* Offizielles Bascom Forumhttp://bascom-forum.de/forum.php ********************************************************* BASCOM - Tutorial - Einführung in Mikrokontroller
Pensionisten-Denkweise:
Zur Programmierung reicht ein Kabel (...das man sich selbst lötet), die Software gibts kostenlos und wenn man mit einer einfachen Hochsprache wie in meinem Beispiel z.B. mit Bascom-Basic anfängt, dann hat man meist schon am ersten Abend ein Testprogramm am laufen. Man braucht also erstmal garnichts anzuschaffen als einen Controller für ca. € 2,- und mit ein paar vorhandenen Kleinteilen und einem Lötkolben in der Werkstatt kann man gleich loslegen! http://www.bunbury.de/Technik/avr/
1. Vorbereitung ATmega8 1. Vorbereitung
1.1 Was kann der Mega8,was kostet der und wo bekomme ich ihn?
|
| Dabei ist der Mega8 recht klein und besitzt die übliche Bauform einfacher Schaltkreise (DIL), die es auch Laien ohne Probleme möglich macht Schaltungen zu löten. Er hat sich mittlerweile quasi als ein Standard durchgesetzt und man kann ihn fast in jedem vernünftigen Elektronikgeschäft für 2 bis 3 Euro kaufen. (bei Conrad zahlt man natürlich das 3fache) |

|
(nach oben)
1.2 Welche Hardware brauche ich um AVRs wie den Mega8 zu programmieren?
Nicht viel. Der Mega8 lässt sich fertig ineine Schaltung eingebaut programmieren - ohne teuresProgrammiergerät, ohne den Chip jedes mal umstecken zu müssen.Also erst die Schaltung aufbauen und einfach später am"lebenden" Objekt jeden einzelnen Befehl sofortausprobieren!
Grundsätzlich genügt es 5V Betriebsspannung anzuschließen undein 5-adriges Kabel zu löten, das am Parallelport des PCsangeschlossen wird. Sicherheitshalber baut man in einigeLeitungen Widerstände ein um sowohl den Parallelport als auchden Chip selbst vor Schäden zu schützen.
Es sei darauf hingewiesen, daß es zu Störungen kommen kann,wenn die Programmieranschlüsse des Mega8 in einer Schaltungzusätzlich für andere Funktionen vorgesehen sind. D.h. ist z.B.an einem der für die Programmierung benötigten Pins schon einRelais angeschlossen, dann kann dieses während desProgrammierens anziehen oder die Programmierung schlägt fehl.Soweit möglich ist es günstig die Programmieranschlüsse alsounbeschaltet zu lassen. Benötigt man alle Anschlüsse für dieSchaltung ist es das Sicherste sich eine Extra-Platine zu lötenund den Chip zum Programmieren umzustecken. Ein Programmierboardsieht am einfachsten so aus:

Diese Schaltung kann als Grundlage genommen werden um Schaltungenfür den Maga8 zu entwerfen, die man jederzeit nachträglichumprogrammieren kann. Dazu empfiehlt es sich noch einenbeliebigen 5poligen Zwischenstecker auf der Platine vorzusehen,um das Programmierkabel abzeihen zu können.
Bei anderen AVR-Typen finden sich die Signale MOSI, MISO, SCK und/Reset ebenfalls und hier sind lediglich die Pinnummernanzupassen.
Den Quarz und die beiden zugehörigen Kondensatoren können füreinfache Anwendungen auch weggelassen werden, da der Mega 8 eineninternen Oszillator besitzt. Allerdings empfehle ich zumindestenseine Schaltung zu besitzen, in der der Quarz oder einKeramikoszillator enthalten sind. Wird der interne Oszillatoreinmal ausgeschaltet und auf extern eingestellt lässt sich derMega8 erst wieder ansprechen und auch erst wiederzurück-umstellen, wenn auch wirklich ein externer Oszillatorangeschlossen ist.
(nach oben)
1.3 Welche Software brauche ich?
Die Software "BASCOM" ist einbeliebter und sehr einfacher Basic-Compiler für dieProgrammierung des Mega8 und anderer AVRs. Er stellt einem sehrviele komplexe Funktionen zur Verfügung um z.B. die Ansteuerungvon Modellbau-Servos oder die Ausgabe von Text auf LCD-Anzeigenmit einem einzigen Befehl zu erledigen. Um z.B. den Wert einerVariablen X über die serielle Schnittstelle auf denPC-Bildschirm zu senden genügt der Befehl: "Print X" -fertig!
Selbstverständlich gibt es auch sehr gute und großteils völligkostenlose Compiler für C sowie Pascal und natürlich kann manauch direkt in Assembler programmieren - worauf ich hier jedochnicht weiter eingehen will.
BASCOM ist nicht kostenlos - die Demo ist aber zeitlich und inden verfügbaren Funktionen nicht eingeschränkt. Lediglich dieProgrammgröße - also quasi die Länge und Komplexität desProgrammes sind eingeschränkt. Zum Erlernen und für vielepraktische Schaltungen ist diese Limitierung aber noch nichtstörend. Wenn man BASCOM kennen und meist auch schätzen gelernthat kann man sich entscheiden ob es einem die gerade mal 80,-Eurofür die Vollversion wert sind oder ob man umsteigt. Der Supportbei registrierter Vollversion funktioniert reibungslos (wenn auchin Englisch) und meist befinden sich im Anhang einer Email derSupport-Mitarbeiter gleich die gewünschten Updates oderDokumente.
Die BASCOM-Demo kann man sich hier von meiner Seiteoder direkt vom Anbieter MCS-electronicsherunterladen. Man achte darauf, daß vor der Installationirgendein Drucker installiert wurde - BASCOM verweigert sonstbeim ersten Starten den Dienst mit entsprechender Fehlermeldung.Und es sollte ein beliebiger Parallelport-Drucker(-treiber) sein- BASCOM akzeptiert USB-Drucker nicht! (Bug)
Da BASCOM Microcontroller direkt über unterschiedlichsteProgrammiergeräte beschreiben kann ist es wichtig sorgfältigdarauf zu achten, daß die folgenden Einstellungen korrektvorgenommen werden:
Options -> Programmer
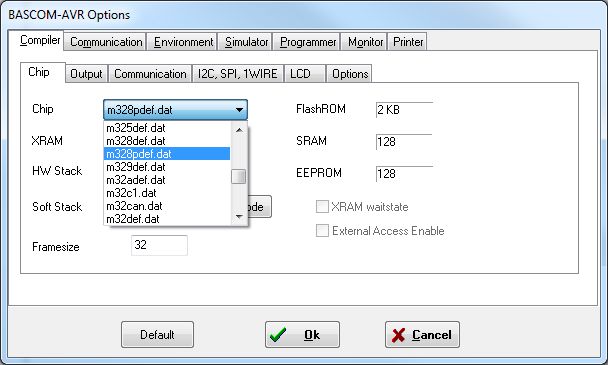
Bei Programmer "Universal MCS Interface" und"WinAVR and SP12" auf der Lasche "Universal"
Das sollte alles sein. Sofern noch nicht geschehen schließt maneinfach das Parallelportkabel und die 5V-Betriebsspannung an denMega8 an und es kann los gehen. Man schreibt ein Programm(nächstes Kapitel) - drückt die Taste F7 um das Programm zucompilieren (in Chip-Sprache zu übersetzen) und ist dies ohneFehlermeldung geschehen drückt man F4 um das Programmerfensterzu öffnen.
Öffnet sich sofort das folgende Fenster genügt ein Klick auf"Autoprogram chip" und man kann zusehen wie der Chipbeschrieben wird - fertig!

Bei den meisten erscheint in diesem Moment aber statt desProgrammers erstmal diese Fehlermeldung:

Das bedeutet, daß die Verbindung zum Chip nicht hergestelltwerden konnte. In 90% aller Fälle (meine Erfahrung) liegt das anfehlerhaft gelöteten Kabeln, falscher Betriebsspannung undKurzschlüssen auf Leiterplatten. Also lieber 8mal hingucken, die5V Betriebsspannung im angeschlossenen Zustand nachmessen undjede einzelne Verbindung durchklingeln bevor man einen Hilferufin die Welt schickt! Gegen falsches Löten kann euch im Internetkeiner helfen!
Ist da 200%ig sicher alles einwandfrei und erscheint trotzdemimmer wieder diese Fehlermeldung, dann kommuniziert BASCOM nichtkorrekt mit dem Parallelport, entweder weil dieser eine andere Adresse als$378 hat (in der Systemsteuerung überprüfen) -oder (meistens) weil z.B. WinXP /2k / NT den Direktzugriff auf den Port verweigert.
In diesem Falle ladet euch die Datei "giveio.sys" und speichert sie im Ordner "../Windows/System32/drivers"
Ist das erledigt habt Ihr 2 Möglichkeiten:
- Ihr ladet euch die Datei "LoadDrv.exe" und könnt/müsst den Treiber jedes mal manuell starten und ggF. abschalten
- Ihr installiert den Treiber permanent indem Ihr die Datei "giveio.inf" ladet und ausführt.
Erklärungen, wie dieser Treiber und die Portfreigabe funktioniert findet Ihr reichlich im Netz. Ich habe den Treiber aus einer mMn seriösen Quelle - übernehme aber selbstverständlich keinerlei Garantie das er virenfrei ist und natürlich auch keine Gewährleistung für mögliche Schäden, die aus der Installation entstehen können.
Informiert euch selbst und wenn Ihr Zweifel habt, dann lasst die Finger davon und kauft euch einen USB-Programmer. Ich nutze diesen Treiber jedenfalls auch und hatte bislang keinerlei Probleme damit.
Dieses Low-Cost-Programmer-Kabel lässt sich nach meiner Erfahrung bis WinXP wirklich an jedem Rechner zum Laufen bewegen - Erfahrungen, ob das unter Vista auch noch geht habe ich einstweilen nicht - falls es jemandem von euch gelingt würde mich eine eine kleine Info freuen. Auf alle möglichen Fehlervarianten einzugehen würde den Rahmen dieses Scripts deutlich sprengen - helfen alle o.a. Maßnahmen nicht weiter, dann fragt bitte einfach in einem entsprechenden Forum.
(nach oben)
http://www.bunbury.de/Technik/avr/vorbereitung.htm
2. Programmierung BASCOM-AVR - Programmierpraxis
Wichtig: diese Anleitung soll diehardwarespezifischen Unterschiede der Programmierung zwischen PCsund Mikrokontrollern vermitteln und richtet sich damit an Leser,die in irgendeiner Weise bereits Vorkenntnisse in Programmierungallgemein besitzen. BASCOM besitzt eine ganz brauchbare Hilfe mitreichlich Beispielcode, mit der sich die genaue Syntax derBefehle wie If-Abfragen, Schleifen etc. schnell herausfindenlässt. Einige Teile sind interaktiv und ermöglichen es z.B. Erklärungen und Beispielrechnungen mit eigenen Werten nachzuvollziehen.
Dazu muß jedoch Javascript aktiviert sein
2. BASCOM - Programmierpraxis
2.1 Zahlen, wie sie ein µC versteht
2.1 prinzipieller Programmaufbau
2.3 digitale Ein- und Ausgänge
2.4 analoge Eingänge (ADCs)
2.5 "analoge" Ausgänge (PWM)
2.6 Hardwareinterrupts
2.7 Timer
2.8 serielle Schnittstelle
2.9 der EEprom
2.1 Zahlen, wie sie ein µC versteht
Um zu verstehen warum ein Microcontrollermanchmal ein unerwartetes Ergebnis präsentiert, sollte man nichtnur wissen, wie man eine Binärzahl in eine Dezimalzahlumrechnet, sondern man sollte das Prinzip kennen, wieZahlensysteme zusammenhängen, daß alle absolut gleichwertigsind und das man mit allen nach den selben Regeln identischrechnen kann - ohne diese vorher in "normale" Zahlenumrechnen zu müssen.
Vorweg: Vermeiden Sie bei Mikroprozessorprogrammen wo immermöglich Fließkommazahlen!
Während es bei der üppigen Rechneleistung eines PCs kaum eineRolle spielt wieviele Dezimalbrüche man miteinander verrechnet,kostet eine einzige Fließkommaoperation beim µC spürbarSpeicher und Geschwindigkeit.
Hier nun erstmal 2 kleine Beispiele, mit denen Sie testenkönnen, ob Ihr Zahlenverständnis wirklich ausreichend ist umauch mal einem Programmfehler auf die Schliche kommen zu können:
Die Variable x ist für beide Aufgaben als Byte dimensioniert:
| x = 249 + 10 = |
|
| x = 249 / 10 = |
|
Für alle die das Zahlenscriptschon gelesen haben, oder auch auchohne dies die richtigen Antworten geben konnten habe ich hiernoch ein paar kleine, nicht weiter dokumentierte Hilfsprogrammeabgelegt, die bei den nötigen Berechnungen sehr hilfreich seinkönnen.
(nach oben)
2.2 prinzipieller Programmaufbau
Ganz kurz vorweg 6 Punkte zurBASCOM-Syntax, die sich bei unterschiedlichen Hochsprachenhäufiger unterscheiden:
- es ist nicht nötig Befehle oder Zeilen durch ein Semikolono.ä. abzuschließen
- Strings bzw. Textkonstanten werden durch Gänsefüßchengekapselt
- Kommentare werden durch ein Hochkomma eingeleitet und endenautomatisch mit einem erzwungenen Zeilenumbruch (Enter-Taste)
- Binärzahlen werden durch &B und Hexadezimalzahlen mit&H eingeläutet. Dezimalzahlen sind natürlich ohne Präfix.
- die Zählweise bei Bits beginnt generell mit Bit 0, währendArrays stets mit Element 1 beginnen
- das Gleicheitszeichen wird sowohl für Vergleiche als auch fürWertzuweisungen identisch verwendet
Ein fertig geschriebenes Programm wird durch F7 compiliert undverläuft dies ohne Fehler kann es mit F4 auf den Chip"gebrannt" werden. Fehler beim Compilieren könnendurch Doppelklick auf die Fehlermeldung (Statuszeile ganz unten)direkt angesprungen werden.
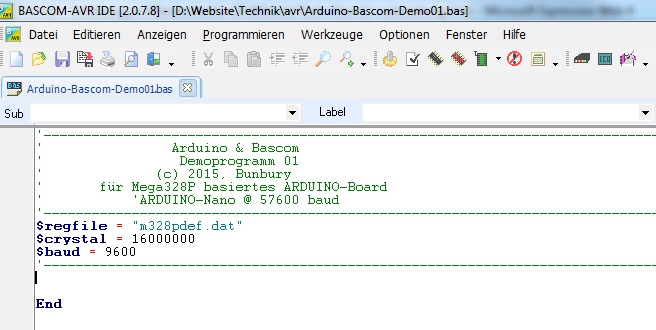
Ein Bascom-Programm beginnt immer damit dem Compiler mitzuteilenfür welchen Mikrokontrollertyp das Programm vorgesehen ist. Dieserfolgt indem man die Definitionsdatei benennt, in der alleprozessorspezifischen Adressen und Eigenheiten abgelegt sind.Diese Dateien befinden sich im Bascom-Stammverzeichnis und dortkann man im Zweifelsfalle auch nachschauen, wie die Datei fürden gewünschten Prozessor genau heißt.
| $regfile = "M8def.dat" | < Definitionsdatei (hier für ATmega8) |
| $crystal = 8000000 | < Quarzfrequenz in HZ angeben (hier 8MHz) |
| Dim x As Byte | < Variablen definieren (hier x als Byte 0 - 255) |
| (Befehle) | |
| Do | < Beginn der Hauptschleife |
| (Befehle) | |
| Loop | < Ende der Hauptschleife |
| End | < Programmende (für Compiler erforderlich) |
Zu Anfang (also vor der Hauptschleife)definiert man Variablen, die Funktionen der Anschlüsse,konfiguriert die Hardware usw. Diesen Teil des Programmesbezeichne ich im Folgenden als Header. Der Header enthält alleAnweisungen, die beim Starten des Prozessors einmalig und vorallen anderen Programmteilen ausgeführt werden sollen.
Welche Zahlentypen verwendbar sind undwelche Werte darin gespeichert werden können entnehmen Sie bitteder Bascom-Hilfe. Am häufigsten wird man wohl Bit (0 oder 1) ;Byte ( 8 Bit = 0 -255) und Word (16 Bit = 2 Byte = 0 - 65535)verwenden.
Nach dem Header folgt üblicherweise für Mikrocontroller eineEndlosschleife, da das Programm sonst nur einmal durchlaufenwürde.
Vor oder auch nach der Hauptschleife kannman später noch beliebige Funktionsteile anfügen, die späterBasic-üblich einfach durch Goto oder Gosub über Ihren Namen(Label) angesprungen werden können. Wird ein Unterprogramm voneinem beliebigen Programmpunkt aus per Gosub Unterprogramm1angesprungen, führt ein Return am Ende des Unterprogrammes dazu,daß das Programm bei erreichen des Return-Befehles wieder direktnach dem Gosub-Befehl fortgesetzt wird. Das Unterprogramm selbstwird einfach durch seinen Namen, abgeschlossen durch einenDoppelpunkt eingeleitet und der Aufruf erfolgt ohne Doppelpunkt:
Gosub Unterprogramm1
(Befehle)
Unterprogramm1:
Return
Es ist nicht erforderlich Subroutinen bzw.Funktionen im Header zu definieren (Funktionsprototypen o.ä.)oder durch einen Befehl der Art Function oder Procedureeinzuläuten - es genügt schlicht das Label (der Name mitDoppelpunkt).
Call by Value (Variablen- bzw. Pointerübergabe) an Funktionengeht nicht - also ausschließlich globale Variablen benutzen.
(nach oben)
2.3 digitale Ein- und Ausgänge
Bevor man die Anschlüsse benutzen kannmuss man festlegen, welche Pins als Ein- oder Ausgänge genutztwerden sollen. Alle Pins sind bidirektional - man kann sich alsoaussuchen wo man was anschließt. Die Einstellung sollte also zuAnfang des Programms (Header) vorgenommen werden - kann aberspäter jederzeit wieder geändert werden.
Die Pins sind in mit Buchstaben bezeichnete Ports unterteilt,denen jeweils Register-Bytes zugeordnet sind, die die Richtungder Daten speichern (Register DDR), die Eingangswerte zumEinlesen beinhalten (Register Pin) oder die Ausgabewerte(Register Port).
|
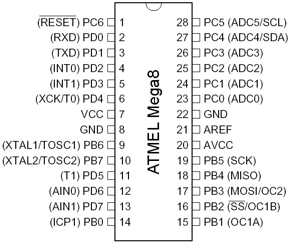
Der Mega8 besitzt 3 Ports: B; C und D, deren Anschlüsse im Bild ersichtlich sind. Nochmal der Hinweis: die Zählweise beginnt immer mit 0. Die Angaben in Klammern beziehen sich auf optionale Verwendungen des Pins: Pin23 - 28 lassen sich z.B. auch als Analogeingänge konfigurieren, über Pin 2 und 3 lässt sich eine serielle Verbindung zum Computer aufbauen usw. Die Pins 9 und 10 (PB6 und 7) sind nur frei verfügbar, wenn der Mega8 auf internen Takt eingestellt ist, da sie sonst für den Quarzoszillator verwendet werden. Pin1 ist standardmäßig mit der Reset-Funktion belegt, womit PC6 auch nicht mehr uneingeschränkt verwendbar ist. Die Reset-Funktion lässt sich prinzipiell auch deaktivieren um den Pin nutzbar zu machen - allerdings lässt sich der Chip dann nicht mehr einfach umprogrammieren. Ich rate davon ab und werde auch nicht näher darauf eingehen. |
Man kann jeweils den Zustand aller Pinseines Ports gleichzeitig verändern/einlesen, indem man einganzes Byte in ein Register schreibt/ausliest.Jedes Bit des Bytesbezieht sich dann auf einen Pin des Ports. Will man nur denZustand eines Bits, also eines einzigen Pins verändern oderabfragen muß man an den Befehl nur einen Punkt und die Nummerdes zu verändernden Pins anhängen.
Also "RegisterPortbuchstabe.Pinnummer = Wert"
Es empfiehlt sich die Werte direkt binär anzugeben(&B...) weil man so einfach abzählen kann, welcher Pinwelchen Wert bekommt:
Ein-/Ausgänge festlegen:
| DDRD = &B00000101 | schaltet PD0 und PD2 als Ausgang, alle Übrigen werden als Eingänge konfiguriert. |
| DDRD.2 = &B0 | setzt nur PD2 auf 0, also auf Eingang und lässt die übrigen Stellen von DDRD unverändert. |
Pins Ein- und Ausschalten:
| PortD = &B00000101 | schaltet die Pins PD0 und PD2 auf 1 (+5V) und setzt die Übrigen auf 0V |
| PortD.2 = &B1 | schaltet nur PD2 auf 1 (+5V) und lässt die anderen unverändert |
Signal an den Pins einlesen:
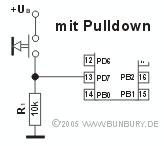
Die Eingänge eines AVRs brauchen immereindeutige Spannungs-Signale: entweder 0V oder +5V. Ein Schalterkann aber nicht 2 verschiedene Spannungen ausgeben, sondern nureinen Stromkreis schließen oder öffnen. Deshalb muss manzusätzlich wie im Bild unten einen Widerstand vorsehen. AndereSchaltkreise, Fernsteuerungsempfänger oder Sensoren mitDigitalausgängen liefern meistens solche Signale und könnenohne zusätzlichen Widerstand angeschlossen werden.
|
DDRD.2 = 0 x = PinD.2 x ist 1 bei gedrückter Taste |
DDRD.2 = 0 x = PinD.2 x ist 0 bei gedrückter Taste |
|

|
|
|
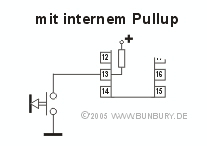
Auch Transistoren machen letztlich nichts anderes als Schalter oder Relais: Kontakt auf oder zu. Deshalb müssen auch Transistoren mit Pull-Widerständen versehen werden, wie im Bild links. Da am Transistorausgang nicht mehr als die 5V vom Pullupwiderstand rauskommen können, ist diese Schaltung auch geeignet um andere Spannungen als 5V einzulesen. Mit dem 10k Basiswiderstand und als Transistor z.B. einem BC550 erhält man bei beliebigen Eingangsspannungen ab ca. 1-2V bis 30V am AVR ein sauberes 0-Signal und mit 0V oder ganz ohne irgendein Signal am Eingang eine logische 1 am AVR. |
Das Eingänge häufig nur mit Tasten oderTransistoren gesteuert werden sollen wussten auch die Entwicklerder AVRs und haben die Pullupwiderstände gleich mit eingebaut.Allerdings muss man diese extra einschalten - da sie imGrundzustand nicht aktiv sind. Statt sich noch ein Registermerken zu müssen hat man dem Benutzer das Leben leicht gemacht:den Pullupwiderstand eines Pins schaltet man ein, indem man eine1 ausgibt, obwohl der Pin als Eingang eingestelltwurde:
|
So kann man sich die extra Pullupwiderstände sparen, wenn man einen Taster oder Transistor anschließt, der 0V (Masse) schaltet: DDRD.2 = 0 PortD.2 = 1 x = PinD.2 x ist 0 bei gedrückter Taste |
Vielleicht ist es aufgefallen: wenn man einen einzelnen Pin, bzw.ein einzelnes Bit ein und ausschalten will ist es egal ob man das&B schreibt, weil die Werte 1 und 0 dezimal identisch sindmit der binären Zahl. Wenn man mehrere Bits gleichzeitig ändernwill - also ein Byte angibt muß man darauf achten. Der BefehlDDRC = &B00001001 schaltet C.0 und C.3 als Ausgänge den Restals Eingang. Dezimal muss 00001001 umgerechnet werden: DDRC=9macht also genau das selbe.
Abschließend noch ein zusammengefasstes Beispiel für diedigitalen Ein- und Ausgänge:
| DDRB = &B00110000 | schaltet B4 und B5 als Ausgänge und B0-B3 als Eingänge, B6 und B7 gibts beim Mega8 garnicht | |
| PortB = &B00010010 | Ausgang B4 wird auf +5V und B5 auf 0V geschaltet und nur der Pullup für den Eingang B1 wird aktiviert - die anderen Eingänge sind "offen" und müssen mit Ausgängen anderer Bausteine verbunden werden. |
Bei Eingängen, an die garnichtsangeschlossen wird sollte man immer den Pullup aktivieren, da siesonst zufällige Zustände haben und das Programm anfangen kannkomische Sachen zu machen.
(nach oben)
2.4 analoge Eingänge (ADCs)
Mit dem Mega8 kann man 6 analogeSpannungssignale im Bereich von 0 bis +5V einlesen, z.B. vonSensoren. Standardmäßig werden die Spannungswerte mit 10 Bitbinär gewandelt und ergeben damit eine Zahl von 0 (0V) bis 1023(+5V). Die 6 Analogeingänge ADC0 - ADC5 befinden sich an denselben Pins wie der Digitalport C - also Pin 23 bis 28. Die Werteeinzulesen ist vergleichsweise einfach. Der ADC muß nur miteiner Zeile im Header konfiguriert und mit einer weiterengestartet und ab dann stehen die Werte zur verfügung:
| Config Adc = Single , Prescaler = Auto | |
| Start Adc |
Ist das einmal im Header geschehen, kannman den aktuellen Wert eines Analog-Kanals jederzeit mit derFunktion Getadc(Kanalnummer) auslesen:
| x = Getadc(4) | schreibt den Wert der Spannung an Pin 27 (ADC4) in die Variable x |
Man beachte, daß die Zahl 10 Bit - alsobis 1023 groß sein kann und damit natürlich nicht in einerVariable der Größe Byte gespeichert werden kann. Deshalb solltex zuvor mindestens als Word (16Bit) definiert worden sein. EinenVariablentyp mit genau 10 Bit gibt es nicht - Word ist dasNächstgrößere.
(nach oben)
2.5 "analoge" Ausgänge (PWM)
Technisch gehört die Ausgabe von"analogen" Spannungen hinter die Einführung in dieTimer, thematisch passt es hier aber besser, nach den analogenEingängen. Eine Analogspannung kann ein Prozessor eigentlichnicht ausgeben, mit einem Trick aber etwas Ähnliches:.
Ein Motor würde z.B. an 6V ca. halb so schnell laufen wie bei12V. Das Selbe - also halbe Drehzahl - erreicht man, wenn man anden Motor für eine halbe Sekunde die volle 12V-Spannung anlegtund Ihn dann wieder für eine halbe Sekunde ausschaltet. Dievolle Drehzahl kann er nicht erreichen, das geht nur, wenn die12V dauerhaft anliegen. Die halbe Drehzahl ergibt sich dadurch,daß der Motor die halbe Zeit beschleunigt und die andere Hälfteabbremst.
So ein Signal, bei dem die Ein- und Ausschaltzeit prozentualeingestellt wird (Puls-Breiten-Modulation) kann ein Controllererzeugen. Die Ein- und Ausschaltzeiten folgen dabei vielschneller als im Beispiel mit der halben Sekunde. Praktisch soschnell, daß eine LED nur schwach zu leuchten schneint und mangarnicht bemerkt, daß diese kurz eingeschaltet und danachzeitweise ganz ausgeschalten ist. Der Mega8 stellt zweiPWM-Ausgänge zur Verfügung: OC1A (Pin15) und OC1B (Pin16)
Um diese benutzen zu können muß im Header der Timer1 für diePWM-Funktion konfiguriert, aktiviert und gestartet werden:
| Config Timer1 = Pwm , Pwm = 10 , Compare A Pwm = Clear Down , Compare B Pwm = Clear Down , Prescale = 1 |
| Enable Timer 1 |
| Start Timer 1 |
Eine genaue Beschreibung was welche Angabebedeutet findet sich in der Bascom-Hilfe.
Ist der Timer so konfiguriert, kann man den aktuellen Wert einesPWM-Augangs jederzeit mit der Funktion Pwm(Kanalnummer)einstellen. Ein PWM Signal wird dann ständig ausgegeben, bis manden Wert = 0 setzt oder den Timer1 stoppt.
In der Config-Zeile ist der PWM-Ausgang auf 10 Bit Auflösungeingestellt - also wieder Werte zwischen 0 und 1023. Gibt man demPWM-Kanal jetzt den Wert 1023 vor, dann ist der Ausgang für 1023von 1023 Zeitabschnitten eingeschaltet - also es kommt dauerhaft+5V aus dem Ausgang. Setzt man den Wert auf 0 (von 1023Zeitschritten) ist der Ausgang ständig auf 0V. Bei allen anderenZahlen ergeben sich Zwischenwerte - gibt man z.B. 10% derinsgesamt 1023 Zählschritte, also 102 als Sollwert vor, dannbekommt z.B. eine LED am Ausgang auch nur 10% der Zeit Strom undscheint demnach auch nur mit 10% Ihrer Leuchtkraft zu leuchten.
| Pwm1A = 512 | gibt ein Schaltverhältnis von ca. 50% (512 von 1023) auf OC1A (Pin15) aus |
Der PWM Ausgang lässt sich auch auf andereAuflösungen als 1023 Schritte einstellen. Die 10 Bit aus demBeispiel haben nicht nur den Vorteil, daß sich so sehr feineAbstufungen einstellen lassen, sondern vorallem, daß mit 0-1023der selbe Zahlenbereich benutzt wird wie bei denAnalogeingängen. Theoretisch könnte man also die Spannung voneinem Potentiometer an einem Analogkanal (1ADC ) direkt auf einenPWM-Kanal ausgeben und so z.B. die Drehzahl eines Motorseinstellen: Pwm1A = Getadc(1) - führt aber leider zu einerFehlermeldung. Man muß zuerst den Analogwert in eine Variableeinlesen und kann dann die Variable auf den PWM-Ausgang schreibenum das zu realisieren:
| x = Getadc(1) | steuert mit dem Analogwert von ADC1 (Pin24) den PWM-Ausgang OC1A (Pin15) |
| Pwm1A = x |
Man beachte, das x wieder mindestens vomTyp Word sein muß, um die 10Bit-Werte aufnehmen zu können.
(nach oben)
2.6 Hardwareinterrupts
Normalerweise läuft das Programm desMikrocontrollers immer in einer Endlosschleife. Man kann nun z.B.ständig den Zustand einer Taste abfragen um daraufhin einenVorgang auszulösen. Die Programmschleife braucht jedoch einegewisse Durchlaufzeit - ist der Tastendruck bzw. dasEingangssignal sehr kurz, erscheint also erst nach einer Abfragedes Pin-Zustandes und ist schonwieder vorbei, wenn dieProgrammschleife wieder bei der Abfrage angekommen ist, dann"bemerkt" das Programm garnicht, daß ein Signal dawar.
Dafür gibt es 2 spezielle Anschlüsse: Int0 (Pin4) und Int1(Pin5).
Diese Pins kann man so konfigurieren, daß sie bei Signalensofort das Hauptprogramm anhalten und zuerst einen anderenProgrammteil ausführen, ohne das der Pinzustand in der Schleifenoch abgefragt werden muß. Solche Funktionen, die daßHauptprogramm augenblicklich unterbrechen können nennt manInterrupts und diese sind vor allem für sehr kurze oderzeitkritische Signale geeignet.
Bei der Einstellung der Parameter kann man auswählen, ob dieUnterbrechung dauerhaft bei 0 Signal (Low Level), oder nureinmalig beim Umschalten von 0 auf 1 (rising) oder umgekehrt von1 auf 0 (falling) erfolgen soll:
| Config Int0 = Falling | löst eine Unterbrechung des Hauptprogrammes aus, wenn Pin4 von 1 auf 0 umschaltet |
| Enable Interrupts | aktiviert allgemein die Interruptfunktionen - muß nur einmal angegeben werden |
Für die Beschaltung mit Pullup- oderPulldownwiderständen gilt das selbe wie bei den"normalen" Digitaleingängen. Ein Interrupt-Anschlusssollte natürlich auch als digitaler "Eingang"definiert worden sein.
Nun muß man dem Prozessor noch mitteilen, was er machen soll,wenn der Interrupt ausgelöst wird. Dazu schreibt man vor odernach der Hauptschleife ein Unterprogramm. Der NamedesUnterprogrammes wird zuerst angegeben, abgeschlossen mit einemDoppelpunkt. Damit weiß Bascom, daß dies ein Label, bzw eineSprungmarke ist. Beendet wird die Subroutine durch den BefehlReturn, der dazu führt, daß der Prozessor dort wieder mit demHauptprogramm fortfährt, wo er unterbrochen wurde:
| Unterprogramm1: | < Beginn des Unterprogramms |
| (Befehle) | |
| Return | < Rückkehr zum Hauptprogramm |
Im Header muß noch mitgeteilt werden, daßzu dem Unterprogramm gesprungen werden soll, wenn ein Interruptausgelöst wird:
| On Int0 Unterprogramm1 | springe bei Interrupt0 zum Unterprogramm1 |
Beim Aufruf eines Unterprogrammes übrigensnur den dessen Namen angeben, ohne Doppelpunkt. Natürlich kannein Unterprogramm, daß automatisch durch einen Interruptangesprungen wird auch jederzeit per Programmbefehl mit GosubUnterprogrammname angesprungen werden.
Noch ein wichtiger Hinweis, falls die Hardwareinterrupts mit Tasten angesteuert werden:
Das "Prellen" von Kontakten ist ein häufiges Problem in elektronischen Schaltungen. Das bedeutet, daß bei Betätigung einer Taste nicht nur ein Impuls gesendet wird, sondern mehrere und häufig nochmals, beim Loslassen der Taste. Dieses Problem kann man entweder elektronisch lösen, indem man kleine Kondensatoren parallel zur Taste anschließt oder per Software. Die Interrupts im AVR werden meist flankengesteuert genutzt und werden so mehrmals aufgerufen, auch wenn eine Taste nur einmal betätigt wurde. Beim Aufruf des ersten Interrupts wird zwar die Abarbeitung anderer Interruptroutinen temporär blockiert, aber der AVR "merkt" sich, daß während dessen ein weiterer Interrupt aufgelaufen ist und führt diesen unmittelbar nach Beendigung der aktuellen Routine aus. Das Abschalten bzw. Disablen des Interrupts während der Abarbeitung hilft leider nichts, da er trotzdem gespeichert wird. Die Interruptroutine wird dann eben beim Wiedereinschalten des Interrupts erneut ausgeführt.
Eine mögliche und relativ einfache Lösung für dieses Problem ist, den Interruptspeicher des AVRs vor dem Verlassen der Routine zu löschen und dies geschieht indem man in das entsprechende Bit des GIFR-Registers eine logische 1 schreibt.
Für den Int0 macht man das z.B. durch den Befehl Gifr.intf0 = 1 . Signalflanken die während der Abarbeitung der Interruptroutine z.B. durch Prellen entstanden sind führen so nicht mehr zu einem wiederholten Anspringen der Routine.
(nach oben)
2.7 Timer
Der Mega8 besitzt zwei Timer: Timer0 undTimer1
Timer sind nichts anderes als Zähler, die durch denProzessortakt selbstständig vorwärts- oder rückwärtszählenkönnen. Je nachdem wie hoch die Quarzfrequenz ist und wie derTimer konfiguriert wird kann man bei bekanntem Timer-Takt anhanddes Zählerstandes sehr genau die Zeit, also z.B. die Dauer einesEingangs-Impulses messen. Man kann den internen Takt auchausschalten (Modus: Counter) und Impulse von externenSignalquellen zählen lassen oder man kann Ihn als PWM-Ausgangkonfigurieren.
Timer sind binärer Zähler - Timer0 ist 8 Bit "breit"und kann demnach nur von 0 bis 255 zählen. Kommt ein 256terZählimpuls geht er wieder auf 0 - das ist so, als ob man einDisplay mit 2 Stellen hat, daß nach 99 auch nur wieder 00anzeigen kann, statt 100. Timer1 ist 16 Bit breit, kann demnachbis 65355 zählen und geht beim 65356ten Zählschritt wieder auf0
Wenn der maximale Zählerstandüberschritten wird und sich der Zähler auf 0 zurückstellt,dann wird ein Interrupt ausgelöst. Wie bei denHardwareinterrupts kann man dem ein eigenes Unterprogrammzuweisen, daß dann automatisch in festen Zeitabständen beijedem Timerüberlauf aufgerufen wird.
Ein Beispiel:
Sie benutzen mit 65536 Zählschritten,
einen Quarz mit MHz
und den Prescaler =
Die Zählschritte des Timers erfolgen mit: Quarzfrequenz / Prescale = 16 MHz / 256 = 62500 Hz - also alle 0,016 ms. Die Dauer, die der Timer insgesamt benötigt bis die 65536 Schritte voll gezählt sind beträgt: 0,016 ms x 65536 = 1.048576 Sekunden.
Stellt man den Timer im Unterprogramm gleich auf einen höheren Startwert als 0 ein, dann zählt er von dort ab natürlich nicht mehr die vollen 65536 Schritte bis er wieder auf 0 umschlägt. So kann man die Zeitabstände zwischen den Interrupts verkürzen und genau einstellen.
Angenommen man will den Takt statt alle 1.048576 Sekunden genau auf Sekunden einstellen (aktualisieren), dann darf der Timer nur noch 1,0 Sekunden / 0,016 ms = 62500 Zählschritte zählen. Ergibt diese Rechnung keine glatte Zahl muß man runden*. Zieht man jetzt diesen Wert vom Maximalwert 65536 ab, erhält man den Startwert, auf den der Zähler voreingestellt werden muss: 3036.
Der Timer zählt jetzt also immer von 3036 bis 65536 und das Unterprogramm wird damit alle 1.0 Sekunden angesprungen, also mit 1 Hz. Das Voreinstellen auf den neuen Startwert sollte man übrigens gleich als erstes im Unterprogramm erledigen. Der Timer kann dann im Hintergrund schon korrekt weiterzählen, während man andere Befehle ausführen lässt. Ein fertiges Programm, in dem der Timerinterrupt alle 1.0 Sekunden aufgerufen wird, könnte also prinzipiell einfach so aussehen:
| $regfile = "M8def.dat" | 'Definitionsdatei für ATmega8 |
| $crystal = 16000000 | 'Quarz: 16 MHz |
| Config Timer1 = Timer , Prescale = 256 | 'Timer konfigurieren |
| On Timer1 Timerroutine | 'Timerinterrupt Subroutine zuweisen |
| Enable Timer1 | 'Timer aktivieren |
| Start Timer1 | 'Timer starten |
| Do | 'Beginn Hauptschleife |
| 'Programmbefehle einfügen | |
| Loop | 'Ende Hauptschleife |
| Timerroutine: | 'Beginn Subroutine |
| Timer1 = 3036 | 'Timer auf neuen Startwert einstellen |
| 'Programmbefehle einfügen | |
| Return | 'Ende Subroutine |
| End |
*Es ist immer sinnvoll, sich vorher etwas Gedanken über Quarz, Prescale und Timer zu machen, wenn das Ergebnis genau werden soll. Je mehr Zählschritte dem Timer noch übrig bleiben, je genauer wird das Ergebnis und je weniger fällt das Runden auf glatte Zählschritte ins Gewicht. Eine Timerschleife für Timer0 mit 256 Schritten schon auf 250 Schritte voreinzustellen kann kaum vernünftige Resultate bringen. Muß man z.B. schon von 0,5 auf einen ganzen Takt aufrunden, ergäbe sich so auf die letzten 6 verbleibenden Zählschritte schon ein Fehler von knapp 10%, währen die 0,5 Rundung auf z.B. 200 verbleibende Schritte nur noch 0,025% ausmacht.
Konfiguriert man den Timer als Counter,dann kann man an die entsprechenden Eingänge: Pin 6 für Timer0und Pin 11 für Timer1 digitale Signale anschließen, die danngezählt werden. Man kann einstellen ob der Zählschritt bei deransteigenden Flanke ( 0 -> 1 Wechsel) oder der abfallendenFlanke des Signals erfolgen soll und selbstverständlich kann manauch hier einen Prescaler vorgeben, so daß z.B. nur jeder 1024teZählimpuls erfasst wird.
Beispiel:
Config Timer1 = Counter , Edge = Rising,, Prescale = 1024 ' Timer1 zählt jedes 1024te Signalan Pin11 in dem Moment, wo dieses von 0 auf 1 umschaltet.
Die Timer bieten noch weitereEinstellmöglichkeiten, die ich hier beim besten Willen nichtaufführen kann. Den Timer1 als PWM-Ausgang zu konfigurierenwurde oben schon teilweise erklärt, über weitere Möglichkeitenkann man sich hervorragend in der BASCOM-Hilfe belesen.
(nach oben)
2.8 serielle Schnittstelle
Die meisten älteren Computer besitzen nochserielle Schnittstellen (z.B. Com1) mit denen AVRs dank Ihrereingebauten UART spielend kommunizieren können. Neuere Computerbesitzen diese Anschlüsse häufig nicht mehr, hier kann man sichaber z.B. mit einem USB Adapter behelfen. Diese Adapter sindentweder kleine Geräte oder sogar im Stecker eines Kabelseingebaut und melden sich beim Betriebssystem wie ein Com-Portan. Alle alten Beispiel- und Terminalprogramme kann man damit über USB weiterverwenden und meist noch mit höheren Übertragungsgeschwindigkeiten. Natürlich kann man die serielle Schnittstelle auch benutzen,um mehrere AVRs miteinander Daten austauschen zu lassen.
Während man mehrere AVRs einfach zusammenschalten kann muss manbeachten, dass die Spannungen von genormten RS232-Anschlüssen(wie am PC) zu hoch (+/-12V) und zudem invertiert sind. Will mannur Daten vom PC empfangen will man aber auch Daten zum PC sendenmüsste man sich zuerst die +/-12V erzeugen und das Signal dannnoch invertieren. Dafür gibt es fertige Bausteine wie den Max232, die das alles auf einmal erledigen.
Allerdings ist das Ganze etwas umständlich: USB hat 5V Pegel, für RS232-Kompatibilität werden die Signale im Wandler invertiert und auf +/- 12V umgesetzt. Diese Spannungen muß der Wandler aus den +5V auch erstmal selbst erzeugen. Auf eurer Platine macht Ihr das ganze mit Max232 o.ä. dann wieder rückwärts - keine schicke Lösung. Die +/-12V RS232-Pegel haben nur da Vorteile, wo das Übertragungskabel sehr lang sein muß - 20m und mehr.
Die Fa. FTDI-Chip bietet ICs an (z.B. FT232R), die sich am USB-Port auch als Com-Port anmelden - aber direkt 5V-Signale ausgeben die man direkt an den Controller anschließen kann. Die ganze Hin- und Herwandlung und Invertierung auf 12V-Signale entfällt, man spart sich Bauteile und es sind wesentlich höhere Kommunikationsgeschwindigkeiten möglich. Meistens kann man so auch gleich die 5V-Versorgungsspannung vom USB-Port für den Controller benutzen und die FTDI-Chips geben meist sogar einen 12MHz-Takt aus, womit man sich den Quarz am Controller auch noch sparen kann.
Leider gibt es diese Wandlerchips nur in SMD-Bauformen, die für Laien nicht einfach zu verbauen sind. Bei der Fa. Elmicro gibt es für weniger als 20,-€ fertige Bausteine mit den Chips von FTDI die sich einfacher verbauen lassen und es gibt sogar fertige USB-RS232-Wandlerkabel, die direkt nichtinvertierte 5V-Signale ausgeben. Diese Kabel kann man direkt an den Controller anschließen und spart sich die ganze Zusatzschaltung mit MAX232 o.ä. vollständig.
Daten auszutauschen ist mit Bascomausgesprochen simpel. Zunächst gibt man dem AVR im Header eineBaudrate an und schon kann man mit einem einfachen "PrintX" den Wert einer Variablen an den Rechner senden.Natürlich können über so eine Datenleitung nur Binärzahlen(Bytes) gesendet werden. Jeder Zahl ist deshalb einBuchstabe/Sonderzeichen (Ascii-Tabelle) zugeordnet, denPC-Programme anzeigen, wenn der entsprechende Zahlenwertempfangen wird.
Bascom kümmert sich von selbst um die Umwandlung desZahlenwertes in ASCII-Zeichen und sorgt auch dafür, daß nachder Zahl in die nächste Zeile gesprungen wird, indem es das Sonderzeichen mit der Ascii-Nummer 13 (CR) als Zeilenumbruch anhängt.
Man kann abernatürlich auch direkt Binärwerte oder Buchstaben/Texte senden:
| $baud = 9600 | 'aktiviert die Schnittstelle und setzt die Baudrate auf 9600 |
Aber Achtung! Vorsicht!! Obacht!!!
Schreibt man das Baud-Statement in den Header wird nicht nur die UART initialisiert, sondern es werden außerdem gleich die endsprechenden RXD / TXD-Pins konfiguriert! D.h. Praktisch: Pin 2 wird als Eingang und Pin 3 als Ausgang gesetzt und die Digital-IOs PD0 und PD1 sind damit nicht mehr verfügbar! Wenn man die serielle Schnittstelle nicht benutzt sollte also auch auf das $baud-Statement im Header verzichtet werden.
Ein Beispiel für die Ausgabe von Werten über die serielle Schnittstelle:
x = 107
y = 110
| Bascom-Befehl | gesendete Werte | Bildschirmanzeige |
|
Print "x" Print "y" |
sendet binär die Werte 120 und 121 für die Buchstaben x und y und anschließend den Wert 13 für Zeilenwechsel |
x y |
|
Print x Print y |
zerlegt die Zahl 107 in 3 Ascii-Zeichen und sendet diese nacheinander + Zeilenwechsel |
107 110 |
|
Print x ; Print y ; |
das Semikolon verhindert den Zeilenwechsel | 107110 |
|
Printbin x Printbin y |
sendet direkt die Variablenwerte ohne Umwandlung (das Empfangsprogramm wandelt nach Ascii um) |
k n |
|
Print "x = "; Print x Print "y " Printbin 61; Print y |
Beispiel für Kombinationen (Ascii Code 61 entspricht Gleichheitszeichen; Semikolon nach "y" wurde vergessen, Print ohne weitere Angabe sendet nur einen Zeilenumbruch) |
x = 107 y =110 |
Tip: Will man zwischen anderen ASCII-Zeichen ein Sonderzeichen versenden, daß BASCOM nicht kennt, dann kann man den ASCII-Code des Sonderzeichens einfach in geschweiften Klammern in den String hineinschreiben, den man senden will.
Beispiel: Print "Hallo Welt!" sendet genau das selbe wie Print "Hallo{032}Welt{033}" weil die {032} dem Ascii-Code des Leerzeichens und {033} dem Ausrufungszeichen entspricht.
Wichtig: der Ascii-Code in den geschweiften Klammern muß immer dreistellig als Dezimalwert angegeben werden.
Wenn man Daten empfangen will ist das Ganze etwas aufwendiger.Trifft ein Byte beim AVR ein muß dieses möglichst schnellausgelesen werden, weil erst dann der Speicher (Udr) frei ist umden nächsten Wert zu empfangen. Weil soetwas zeitkritisch istist im AVR wieder ein Interrupt vorgesehen (Urxc), mit demautomatisch beim Eintreffen eines Bytes ein Unterprogrammanspringen kann, um das Auslesen sofort zu erledigen.
Den RS232-Empfang im Header vorbereiten:
| On Urxc Datenempfang | ' Unterprogramm für RS232 Empfang angeben |
| Enable Urxc | ' Interrupt aktivieren |
| Dim x As Byte | 'beliebige Variable zum Auslesen des Wertes |
und dann später im Programm:
| Datenempfang: | ' Label für Unterprogramm |
| x = Udr | ' empfangenen Wert (Udr) in die Variable x auslesen |
| ' weitere Befehle | |
| Return | ' Rückkehr zum Ursprungsprogramm |
In der Variablen x steht jetzt der Wert,der zuletzt empfangen wurde. Trifft ein neues Byte ein wird derletzte Wert von x natürlich überschrieben. Deshalb sollte man -wenn mehrere Bytes nacheinander zu erwarten sind - x möglichstsofort im Unterprogramm weiterverarbeiten, oder in einem Arrayablegen. Drückt man auf dem PC eine Taste, dann wird der zurTaste gehörige Ascii-Wert empfangen. Diesen kann man entwederdirekt auswerten (If-Abfrage o.ä.) oder mit dem Befehl y =chr(x) einer anderen Variablen (String) wieder das Zeichen/denBuchstaben zuweisen. Häufig ist es aber für einzelne Zeichen(Steuertasten) sinvoll sich das zu sparen. Tragen sie in einesbeider Felder einen Wert ein und klicken Sie ins andere um dasErgebnis zu erhalten:
| Ascii-Zeichen: |
|
(Buchstabe, Ziffer, Sonderzeichen) |
| Ascii-Wert: |
|
(Dezimalzahl) |
Für den Empfang bzw. zum Senden von Daten im Ascii-Formatgenügt auf dem PC grundsätzlich jedes Terminalprogramm. Wie diegrunsätzlichen Einstellungen vorzunehmen sind habe ichexemplarisch für HyperTerminal beschrieben. Sicher gibt es sehr viel bessere Terminalprogramme (in Bascom ist auch eines enthalten), allerdings hat Hyperterminal den großen Vorteil, daß es auf vielen Windowsrechnern bereits vorinstalliert ist, da es zum Programmpaket gehört. D.h. ohne extra Programminstallation kann man so Daten seiner AVR-Schaltung an fast jedem Windowsrechner anzeigen lassen und auch senden.Die Anleitung findet Ihr hier: Hyperterminaleinrichtung
Sofern man eine PC-Programmiersprache beherrscht ist esnatürlich schöner sich eigene Programme zu schreiben, mit denenman dann auch nicht nur einzelne Buchstaben oder Zahlen, sondernauch direkt die binären Werte verarbeiten kann.
Und noch etwas: der AVR generiert seine Baudrate indem er den Quarztakt teilt. Wie beiallen binären Teilen kann es da zu Rundungsfehlern kommen, die zumindest bei höherenBaudraten, also schnellem Datentransfer, zu Übertragungsfehlern führen können. Deshalb ist es sinnvoll hierbeikeine "glatten" Taktfrequenzen zu verwenden, sondern "krumme" Quarze mit Frequenzen wie 3,6864 7,3728 oder 9,216 MHz,weil hier die AVR-Interne Taktteilung ohne Fehler aufgeht. Genauere Erklärungen dazu findet Ihr auf der Seite www.rowalt.de bzw. im AVR-Lehrbuch von Roland Walter.
(nach oben)
2.9 der EEprom
Der EEprom ist ein Speicher, in dem manDaten wie Variablen und Texte fest abspeichern kann, so, daß sieauch nach dem Abschalten der Betriebsspannung nicht verlorengehen und beim nächsten Einschalten des Gerätes wiederausgelesen werden können. Wichtig zum Thema EEprom zu wissenist, daß man nur einzelne Bytes abspeichern kann. D.h. um einenText zu speichern muß man z.B. Buchstabe für Buchstabe diejeweiligen Ascii-Zahlen speichern und beim nächstenProgrammstart wieder zu einem Text zusammensetzen. Das speichernund auslesen ist denkbar simpel und erfordert keinerleiKonfiguration oder Aktivierung im Header:
| Writeeeprom x , 1 | ' Speichert den Wert der Variablen x in Speicherzelle 1 |
| Readeeprom x , 1 | ' liest Speicherzelle 1 aus und weist den Wert der Variablen x zu |
Es können nur Varablen des Typs Bytedirekt abgespeichert werden, bei Variablentypen die mehrere Bytesbenötigen (z.B. Word) muß man den Wert zunächst in einzelneBytes zerlegen, diese einzeln abspeichern und später, beimAuslesen, wieder zusammensetzen:
| Dim x As Byte | ' x als Byte definieren |
| Dim y As Word | ' y als Word definieren |
| y = 899 | ' y beliebigen Wert zuweisen (z.B. ADC Wert o.ä.) |
In einer als Byte vorbereiteten Variablen xkann man kurzzeitig die einzelnen Bytes vom Word yzwischenspeichern. Das Kombinieren des Teilens und Speicherns ineiner Befehls-Zeile ist bei Bascom nicht möglich:
| x = High(y) | ' weist x das MSB (High-Byte) des Words y zu |
| Writeeeprom x , 1 | ' speichert x in Zelle 1 |
| x = Low(y) | ' weist x das LSB (Low-Byte) des Words y zu |
| Writeeeprom x , 2 | ' speichert x in Zelle 2 |
Das Word y ist so auf dieEEprom-Speicherzellen 1 und 2 aufgeteilt. Wenn man verstandenhat, wie Binäre Zahlen funktionieren (Zahlenscript gelsen?) dannist es simpel diese 2 Bytes später wieder zu einem Wert des TypsWord zusammenzusetzen:
| Readeeprom x , 1 | ' Speicherzelle 1 (High-Byte) in die Variable x auslesen |
| y = x * 256 | ' bitte selbst nachdenken... |
| Readeeprom x , 2 | ' Speicherzelle 2 (Low-Byte) in die Variable x auslesen |
| y = y + x |
y hat jetzt wieder den ursprünglichenWert, der vorher zerlegt abgespeichert wurde. Natürlich muß mandie Adressen der Speicherzellen nicht unbedingt direkt angeben,sondern kann auch hierfür Variablen verwenden.
Wichtig zu wissen ist, daß das Lesen und Beschreiben des EEpromsfür µC-Verhältnisse recht lange benötigt und vorallem, daßder EEprom nicht beliebig of beschrieben werden kann. Esempfiehlt sich also das Lesen/Schreiben nicht innerhalb einerSchleife ständig zu wiederholen, sondern die Daten nur wenn esnötig ist einmal zu speichern (z.B. auf Tastendruck imUnterprogramm) und die Daten z.B. nur einmal beim Starten vor derHauptschleife auszulesen.
(nach oben)
http://www.bunbury.de/Technik/avr/bascom.htm
3. Beschaltung Sensorwerte messen
Wenn man einen Mikrocontroller programmierthat ist das natürlich nur die halbe Miete. TTL-ICs und Mikrocontroller wie der Mega8 können meist nur 5V-Signaleeinlesen und ausgeben und der Ausgangsstrom ist auf wenige mAbeschränkt.
Was ist zu tun, um einen Motor mit 12V Spannung und 1A Strom zusteuern?
...um ein Sensorsignal mit 0-10V einzulesen?
...um zu kleine Signale von wenigen mV zu verstärken?
...um einen PC anzuschließen?
...um einen Modellbau-Empfänger oder ein Modellbauservo anzuschließen?
Dazu finden Sie am Ende der Seite einen Link, indem die Beschaltung von TTL-Schaltkreisen im Allgemeinen erklärt wird und diese Schaltungen funktionieren natürlich auch am Mega8.
Vorab sollten Sie sich aber folgende Betriebsdaten des Mega8 einprägen oder besser notieren!
Sie werden diese beim Basteln oder Berechnen von Bauteilen immer wieder benötigen:
Betriebsspannung: +5V
max. Eingangs-/Ausgangsspannungen von Signalen: +5V
max. Ausgangsstrom pro Pin: 40mA
max. Gesamtstrom aller aktiven Ausgangspins: 200mA
Auch wenn einem Ausgangsströme von 40mA erstmal als nicht sehr vielerscheinen mögen ist der Mega8 im Vergleich zu seinerSchaltkreis-Verwandschaft geradezu üppig ausgestattet, viele Schaltkreise sind nichtmal in der Lage den Strom für eine LED am Ausgang zu liefern.
http://www.bunbury.de/Technik/avr/beschaltung.htm
http://www.bunbury.de/Technik/avr/bascom.htm
*********************************************************
4TAP 4-Teile-AVR-Programmer am COMx-PORT
bestehend aus 3 Widerständen und einem Transistor.
Ich wollte endlich auch mal Mikrocontroller programmieren, aber mit möglichst geringem Anfangswiderstand. Ohne Bootloader, ohne Entwicklungsplatine, sondern etwa so wie im "Lernpaket Mikrocontroller" von Franzis. Das Programmieren und Flashen sollte aber komfortabler sein, am liebsten in Basic. Der Mega8-ISP-Programmer vom selben Autor wie das Lernpaket (Burkhard Kainka), kam der Sache schon ziemlich nahe. Allerdings musste für den Einsatz von AVRdude dessen Konfigurationsdatei editiert werden. Außerdem muss immer die serielle Schnittstelle geöffnet sein, weil ohne einen HIGH-Pegel an RTS der Controller in den Reset-Zustand geht. Herausgekommen ist der "4-Teile-AVR-Programmer", kurz 4TAP.
http://www.franksteinberg.de/4TAP.htm
DIN A4 ausdrucken
ENDE