|
http://sites.schaltungen.at/sie-fahren-km-h/
Wels, am 2015-12-24BITTE nützen Sie doch rechts OBEN das Suchfeld [ ] [ Diese Site durchsuchen]DIN A3 oder DIN A4 quer ausdrucken
*******************************************************************************I** DIN A4 ausdrucken (Heftrand 15mm / 5mm) siehe http://sites.schaltungen.at/drucker/sites-prenninger
********************************************************I* ~015_b_PrennIng-a_sie.fahren.km-h- (xx Seiten)_1a.pdfGeschwindigkeitsmessung km/h mit ARDUINO UNO 24GHz Radar-Sensor IPM-165 entspricht Hygrosens RSM-1650 http://hjberndt.de/soft/radar/indexfall.html http://hjberndt.de/soft/radar/index.html
Alles von www.schaltungen.at downloadbar.
Zeitintervallmessung (Zeitdifferenzmessung) Geschwindigkeitsanzeige (Zeitnehmung / Stoppuhr) - - Anzeige "Sie fahren ... km/h" - - Gewitter-Entfernungsmesser - - Zeitintervall Messer 0..99 - - Reaktionszeitmesser - - Reaktionszeit-Tester - - Radarfalle/Geschwindigkeitsmessung - - http://www.mikrocontroller.net/articles/Mikrowellensensor x000_b_elektor-x_010127-11 Optischer Passiv-Personenmelder +++ (Helligkeitsschwankungen) - 2003-02s76_1a.pdf 048_d_fritz-x_906059-11 Laufzeit-Messer (Start-Stop Kurzzeitmesser für Kfz Geschwindigkeitsmessungen) § LM555 4027_1a.pdf ~100_a_ADAC-x_Geschwindigkeitsmessung mit Lichtschranken_1a.pdf 300_c_fritz-x_Zeitintervallmessung - Zaehler (7 Seiten)_1a.pdf 300_c_fritz-x_Digitale Zeitintervall-Messung - Zeit- und Frequenzmessung (45 Seiten)_1a.pdf 301_d_PE-x_PE82-10s36 Digitaler Reaktionstester 0,2..2sec § SN7490 CA3161 TIL701 SN74123 SN7478 SN7413 Ls_1a.pd 374_c_1X-8Dis-1IC-1U-9V_ICM7226B FrequenzZähler für Frequenzverh., Zeitintervall, Ereignis 1_1a.pdf x544_c_3Sch-18Led-3U-9V_83507-11 Gewitter Entfernungsmesser § LM555 4017_1a.pdf ~544_b_8D-1IC-9V_#B232 Zeitnehmung, elektr. Infrarot-Stoppuhr mit Uhrenplatine_1b.doc x574_c_1X-4Sch-2St-1IC-5V_010206-11 87LPC762 PIE-310 Speed-O-Meter Geschwindigkeitsmessung Lichts_1a.pdf ~667_c_ES-x_Kfz-Geschwindigkeitsmeßgerät Weg-Zeitmessung § Beschreibung Lichtschrankenmessung_1a.pdf 802_c_11Led-2T-2U-9V_pr78-08-05 Reaktionszeitmesser (0,1..1sec) § 4017 4049 BC239 10 LEDs_1a.pdf 842_b_unhaya-x_SE261 Digitaler Zähler 00 bis 99 - Rundenzähler für Modell-Autorennbahn +++ § CD4026 MD1133 Summer_1a.pdf 914_d_#83-2s56-x_835xx-11 Reaktions-Tester (Timer)_1a.pdf x914_d_#83-7s2-x_ Gewitter-Entfernungsmesser (Zähler, LEDs)_1a.pdf 954_b_KEMO-x_E-A-M 2001-07-31 Stoppuhr mit IR-Lichtschranke (Kemo #B232) § TSHA5201 TFMO403_1a.pdf 978_d_ewb-0V_D4-59° Periodendauer-Meßgerät mit 4040 und 7490 (3-stell. Geschwindigkeitsmes.)_1a.msm 978_d_ewb-0V_D4-61° Zeit-Meßgerät mit MMV und 7490 (3-stell. Geschwindigkeitsmessung 30km-h)_1a.msm Alls Kfz-Geschwindigkeitsmesser mit Doppel-Lichtschranken 30km/h = 8,333m/sec. +++ (1A) PE = Populäre Elektronik 1982 Nr.10 Seite 36 BUCH: Einfacher Einstieg in die Elektronik mit AVR-Mikrocontroller und BASCOM Stefan Hoffmann Smiley-Blitzer Seite 246 Messung der Kfz-Geschwindigkeit mit 2 Lichtschranken und ATmega8 und 7-Segm. Anzeige
BUCH: Elektrische Messtechnik
Analoge, digitale und computergestützte Verfahren Richard Lerch
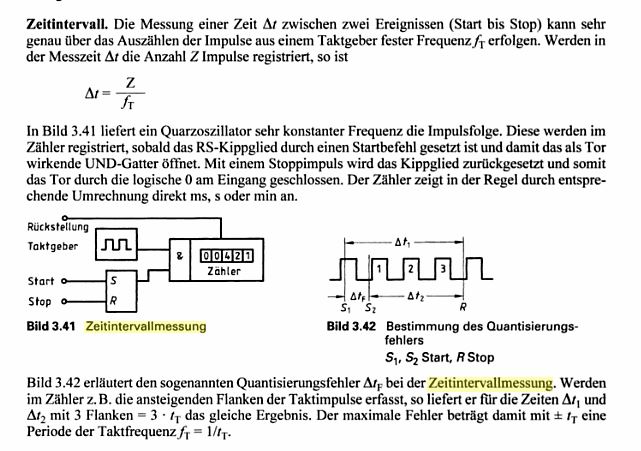
6. Auflage mit Studentenversion von NI LabVIEW und Übungsaufgaben auf DVD12.3.1 Zeitintervallmessung (Zeitdifferenzmessung) Seite 398
https://books.google.at/books?id=-LEdBgAAQBAJ&pg=PA378&lpg=PA378&dq=zeitintervallmessung&source=bl&ots=BV_SC58QPy&sig=eTPC7Bbx80HCPZSx_5t0cENAkLI&hl=de&sa=X&ei=g6gCVeDfNIbbatrdgLAM&ved=0CEYQ6AEwCA#v=onepage&q=zeitintervallmessung&f=false
http://goo.gl/jG7LIG 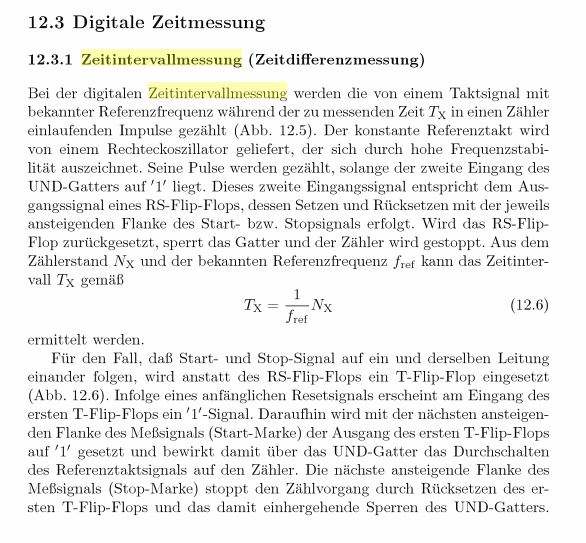 
BUCH:
Elektrotechnik für Maschinenbauer
Grundlagen und Anwendungen
Hermann Linse, Rolf Fischer
12. Auflage
Teubner-Verlag
Zeitintervall-Messung Seite 217
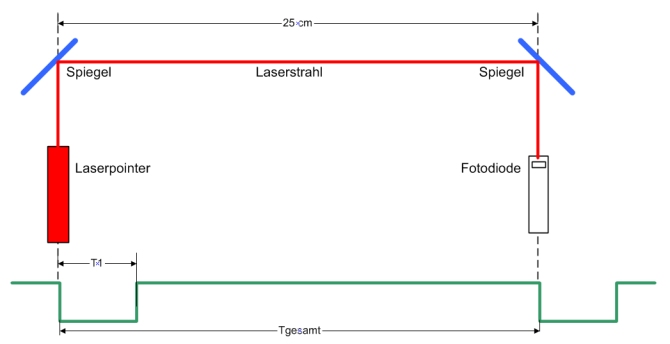
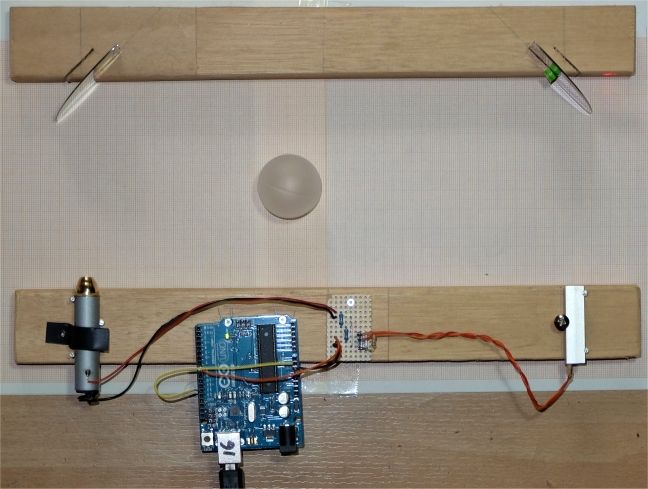
********************************************************* Geschwindigkeit messen mit ARDUINO UNO R3 von Gerd Sinning Elektronik-Labor Projekte AVR Was man immer schon wissen wollte. Wie schnell sind die kleinen Rennautos. Mit einem Arduino und wenigen Bauteilen kann man die Geschwindigkeit messen. Die Bauteile sind praktisch in der Bastelkiste oder im Starter-Kit und kosten wenig, allerdings muss man etwas sägen und hämmern um es zu bauen. Man braucht einen Laserpointer und eine Fotodiode BPW34 (LDR03 geht ev. auch bei langsamer Geschwindigkeit), dann ein paar Oberflächenspiegel, die sind aus einer alten Harddisk ausgebaut und sehen so aus wie eine glänzende CD. Mit der Blechschere werden daraus zwei Segmente geschnitten, das sind die Spiegel zum Umlenken des Laserstrahls. Zwei Bretter braucht man auch noch um das zu befestigen.
Das Schema vom Versuchsaufbau, mit Laserpointer, Spiegel und Fotodiode. Wenn ein Messobjekt den Laserstrahl unterbricht, dann sieht man ein Oszillogramm wie unten in grün. Das Signal der Fotodiode geht auf den Input Capture Pin des Arduino und die fallende Flanke triggert und speichert die Startzeit = Tstart. Dann wird der triggerlevel umgedreht und wenn das Messobjekt den Laserstrahl wieder freigibt dann triggert die steigende Flanke und speichert die Endzeit1 = T1. Wieder wird der Triggerlevel umgedreht und die fallende Flanke triggert und speichert die Endzeit2 = Tgesamt. Jetzt ist die Zeit bekannt und die Geschwindigkeit v lässt sich berechnen, v ist gleich Weg (25cm) durch die GesamZeit = Tgesamt. Gemessen wird in beiden Richtungen, von links nach rechts oder von rechts nach links Man sieht, das Messobjekt muss kürzer als der Weg sein, das kann ein Nachteil sein, aber man kann dann die Wegstrecke von 25 cm auf z. B. 100 cm verlängern bis es passt. Der Aufbau hat ein paar Vorteile, es gibt nur eine Fotodiode für die Messung, so dass die Abfallzeiten der Elektronik keine Rolle spielen, sie sind jeweils gleich. Die gesamte Verdrahtung ist auch nur auf einer Seite, recht angenehm im Aufbau.
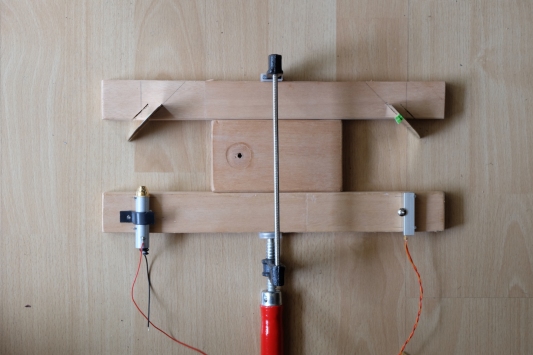
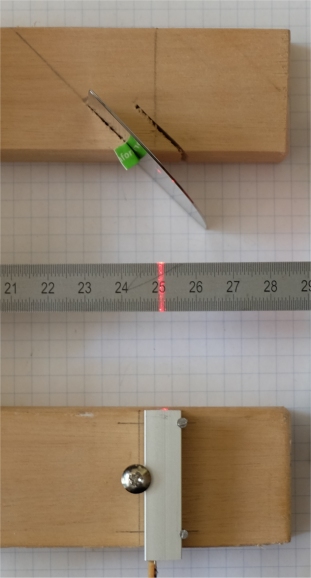
Justieren ist wichtig, mit einer Schraubzwinge und einem Brett bleibt das parallel und man kann die Spiegel justieren. Der Abstand soll 25 cm betragen. In der Software gibt es dazu eine kleine Hilfe, wenn man ARDUINO pin-9 auf Masse legt dann wird der TIMER1 abgeschaltet und die LED pin-13 (on board) leuchtet, wenn der Laserstrahl die Fotodiode trifft. Man verbiegt die Spiegel solange, bis die LED pin-13 leuchtet. Wenn pin-9 offen ist wird gemessen. Zum Test habe ich eine Kugel durchrollen lassen, von einem Aluwinkel als schiefe Ebene. Sie rollt dann mit konstanter Geschwindigkeit durch die Lichtschranke, hier das Ergebnis. Die Ausgabe ist über die serielle Schnittstelle, LCD Anzeige ist in der Software definiert aber hier nicht verwendet.
.PW low= 794837 PWtotal= 6483229 PW % = 12.26 Die PW (pulse width in counts) sind mehr fürs Debugging und kann man löschen, dann kommt die Laufzeit in Mikrosekunden und die Geschwindigkeit in cm/sec. Interessant ist vielleicht noch PW %, das Verhältnis von .PW low zu PWtotal, daraus kann man die Länge des Messobjekts berechnen. Hier ist das ziemlich konstant bei ca 12 %, das sind 3cm von gesamt 25cm. Stimmt recht gut mit der Kugel überein. Die Geschwindigkeitsmessung mit Arduino funktioniert gut, mit geringen Kosten und etwas Arbeit . Viel Spaß beim Basteln! /*Speedy.inoArduino Speedy Misst die Zeit und berechnet die Geschwindigkeit. Download: Speedy.zip
Quelle:
http://www.elektronik-labor.de/Arduino/Speed.html http://www.b-kainka.de/last.htm DIN A4 ausdrucken
********************************************************I*
Impressum: Fritz Prenninger, Haidestr. 11A, A-4600 Wels, Ober-Österreich, mailto:[email protected]ENDE
a
a
a
a
a
a
|