|
http://sites.schaltungen.at/sie-fahren-km-h/
Wels, am 2015-12-24BITTE nützen Sie doch rechts OBEN das Suchfeld [ ] [ Diese Site durchsuchen]DIN A3 oder DIN A4 quer ausdrucken
*******************************************************************************I** DIN A4 ausdrucken (Heftrand 15mm / 5mm) siehe http://sites.schaltungen.at/drucker/sites-prenninger
********************************************************I* ~015_b_PrennIng-a_sie.fahren.km-h/ (xx Seiten)_1a.pdf
Experimental Doppler Radar (Module 160385-91) € 82,95
Oder wie man seine eigene Radarfalle baut
elektor 2018-07s0xx

Produkte
Links
Leider führen die zwei letzeren Links immer noch ins Leere
Extra-Info / Update
* misst die Geschwindigkeit bewegter Objekte
* Handelsübliches Low-Power-Radarmodul * K-Band (24 GHz) * Reichweite mindestens 60 m (bis 100 m möglich) * Auflösung 0,24 m/s ˜ 0,87 km/h * Messbereich bis etwa 45 m/s ˜ 160 km/h * einfach zu verstehende digitale Signalverarbeitung * Universelle dsPIC-Basisplatine geeignet auch für andere Anwendungen 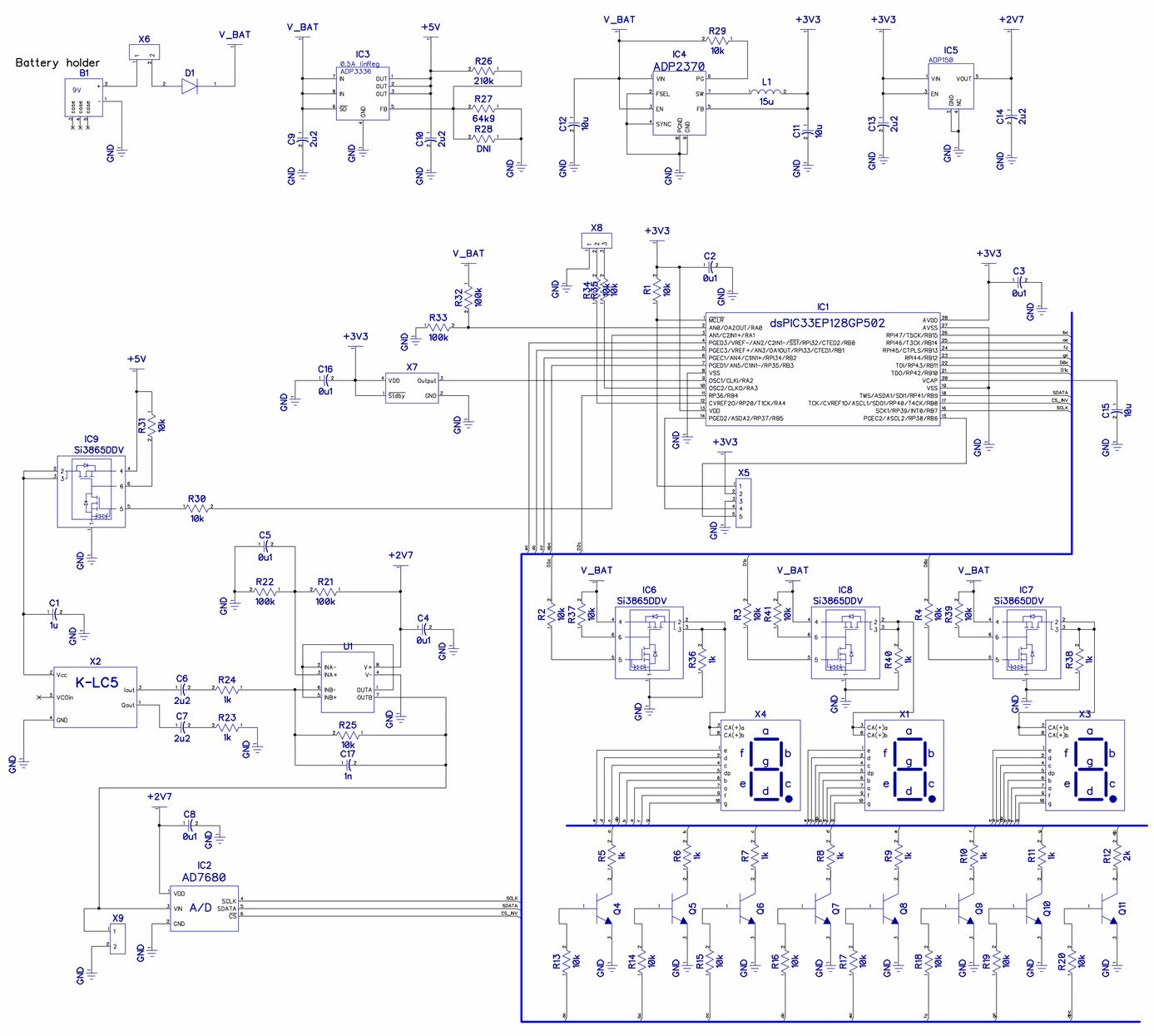
Vor ein paar Jahren las ich einen Artikel über kleine Radar-Systeme.
Danach fielen mir vermehrt Produktnachrichten von verschiedenen Firmen über kleine, kostengünstige Radar-Transceiver-Chips und Module auf.
Schließlich reizte mich das Thema so sehr, dass ich mich in ein Mikrowellen-Radar-Projekt vertiefte…

Beschreibung
Measure the speed of a pedestrian, a car, a ball or other moving objects with this Doppler radar. Point it at a moving target and read the speed on a large 1”-high, 3-digit, 7-segment display. Designed to fit in a watertight sturdy enclosure with transparent cover the Doppler radar can be used outdoor as well as indoor. A 9-volt battery powers the radar. Details
Important Note: To operate this kit you also need a Doppler radar transceiver module like the K-LC2 or the K- LC5 (to be purchased separately). The assembled module on the picture is a prototype, slightly different from the final version Spezifikationen
Elektor | July 2018
Vor ein paar Jahren las ich in der Zeitschrift Circuit Cellar [1] einen Artikel über kleine Radargeräte von Gregory L. Charvat.
Danach habe ich auch Produktneuigkeiten von verschiedenen Firmen über kleine, kostengünstige Radarchips und -module bemerkt.
Seitdem habe ich eine Idee für ein Hobbyprojekt auf einem Mikrowellenradar entwickelt.
Jetzt, da ich etwas zu zeigen habe, möchte ich die Projektergebnisse und einige Einblicke in diese interessante Technologie mit anderen Elektor-Lesern teilen.
Ziel des Projekts war es, ein Mikrowellen-Doppler-Radar unter Verwendung eines kostengünstigen Radarmoduls zu bauen.
Das Interessanteste war meiner Meinung nach, neue Dinge zu lernen und Elektronik-Teile so zu machen, dass sie wie geplant funktionieren.
Natürlich ist es auch wichtig, das Endprodukt in irgendeiner Form zu verwenden.
Ein Doppler-Radar kann beispielsweise die Geschwindigkeit eines Balls, eines Fahrrads oder einer laufenden Person messen, was sich unter den sportlichen Kindern der Nachbarschaft als ziemlich unterhaltsam herausstellen kann.
Funktionsprinzipien
Das Blockschaltbild der RF-Komponenten des Radarmoduls ist in Abbildung 1 dargestellt.
Dies ist ein Auszug aus dem Datenblatt des Moduls. Das übertragene Signal wird von einem spannungsgesteuerten Oszillator (VCO) erzeugt, der nominell im Frequenzbereich 24.050-24.250 GHz arbeitet.
Über den als FM-Eingang gekennzeichneten Tuning-Spannungseingang des Moduls kann der VCO frequenzmoduliert werden.
Bei dieser Anwendung wird jedoch ein einfaches Doppler-Dauerstrichradar gebaut, und der Tuning-Eingang wird nicht benötigt.
Ein Radar arbeitet durch Senden eines Signals unter Verwendung der Sendeantenne.
Wenn die gesendete Wellenfront auf ein Hindernis trifft, wird ein Teil der gesendeten Energie vom Hindernis gestreut und kann von der Radarempfangsantenne empfangen werden.
Wenn die Wellenform einen Impuls oder eine andere Modulation enthält, kann das Radar die Entfernung zum Hindernis basierend auf der gemessenen Flugzeit des Signals messen.
Wenn die Wellenform wie in diesem Projekt nicht moduliert ist, kann der Abstand nicht gemessen werden.
Eine Bewegung des Hindernisses kann jedoch basierend auf der Doppler-Verschiebung in dem empfangenen Signal erfasst werden.
Das gesendete Oszillatorsignal ist über einen Richtkoppler mit der Sendeantenne verbunden.
Aufgrund des Richtkopplers ist der größte Teil der Signalenergie an die Sendeantenne angeschlossen, ein Teil der Energie wird jedoch an die HF-Mischer des Empfangspfads gekoppelt.
Der HF-Mischer ist eine Komponente mit drei Anschlüssen, deren Anschlüsse üblicherweise als HF-, Zwischenfrequenz- und LO-Anschlüsse (Radio Frequency, Funkfrequenz) bezeichnet werden.
Unter einem HF-Mischer kann eine nichtlineare Komponente verstanden werden, die an ihrem ZF-Ausgang Summen- und Differenzfrequenzen der LO- und HF-Signale erzeugt.
Der Zweck des Richtkopplers für den Senderpfad besteht darin, eine Probe des gesendeten Signals zu entnehmen und es mit dem LO-Port des Empfangspfadmischers zu verbinden. Betrachten wir das folgende Beispiel.
Die Frequenz des Sendesignals und damit des LO-Signals des Empfängermischers beträgt 24,1 GHz. Das empfangene Signal, d. H.
Das Mischer-HF-Port-Signal von der Empfangsantenne, hat eine Frequenz von 24,100001 GHz.
Wenn das HF-Port-Signal des Mischers 1 kHz höher ist als die LO-Signalfrequenz des Mischers, liegt am IF-Ausgang des Mischers ein sinusförmiges Signal mit 1 kHz-Frequenz an.
Der Mischer erzeugt auch ein Signal mit einer Summenfrequenz (ungefähr 48,2 GHz) und verschiedenen anderen harmonischen Frequenzen, aber diese Signalkomponenten sind in dieser Anwendung entweder gefiltert oder anderweitig nicht signifikant.
Wenn das empfangene Signal 1 kHz unter der LO-Signalfrequenz wäre, gäbe es dasselbe 1 kHz-ZF-Ausgangssignal.
Die HF-Portfrequenzen von 24.100001 GHz und 24.099999 GHz sind sogenannte Bildfrequenzen, da sie dasselbe ZF-Ausgangssignal erzeugen.
Das in Abbildung 1 dargestellte Radarmodul verfügt über zwei Mischer, die an ihren Ausgängen mit I und Q gekennzeichnet sind.
Dies sind sogenannte In-Phase (I) - und Quadratur (Q) -Signalkomponenten. Der Q-Komponentenzweig des Mischers verfügt über einen 90-Grad-Phasenschieber im LO-Anschluss.
Ansonsten sind die Zweige I und Q identisch.
Aus der Phasenbeziehung zwischen I- und Q-Signalen kann geschlossen werden, ob die HF-Signalfrequenz über oder unter der LO-Signalfrequenz lag.
Bei dieser Anwendung wird jedoch das Bildfrequenzproblem ignoriert und nur der I-Zweig-Ausgang des Mischers verwendet.
Wie oben beschrieben, ist es möglich, kleine Frequenzabweichungen im Sende- und Empfangssignal durch Messen des Mischer-ZF-Ausgangssignals zu messen.
Diese kleinen Frequenzabweichungen sind das Wesen dieser Anwendung. Das physikalische Phänomen, das solche Abweichungen verursacht, wird als Doppler-Effekt bezeichnet.
Trifft die ausgesendete Wellenfront auf ein Hindernis oder mit anderen Worten auf ein Ziel, das sich direkt auf das Radar zubewegt, beträgt die Frequenzverschiebung des gestreuten Signals df = 2 * v * f0 / c0.
In dieser Formel ist v die Geschwindigkeit des Ziels, f0 ist die Sendefrequenz und c0 ist die Lichtgeschwindigkeit. Eine Zielgeschwindigkeit von 1 m / s entspricht einer Doppler-Verschiebung von etwa 160 Hz bei einer Sendefrequenz von 24,1 GHz.
Der im vorherigen Beispiel verwendete Frequenzversatz von 1 kHz entspricht einer Geschwindigkeit von etwa 6,2 m / s, d. H. Etwa 22,4 km / h.
Wie oben erwähnt, wird in dieser Anwendung nur der I-Zweig der Mischerausgänge verwendet.
In der Praxis bedeutet dies, dass wir, wenn wir den Frequenzversatz von 1 kHz messen, sagen können, dass die Radialgeschwindigkeit des Ziels etwa 6,2 m / s beträgt. Wir können jedoch nicht sagen, ob sich das Ziel auf das Radar zu oder von diesem weg bewegt, da die Frequenz des empfangenen Signals entweder 24,1000001 oder 24,099999 GHz betragen kann.
Schaltungsbetrieb
Anhand der Darstellung der Funktionsprinzipien wird das Ziel für die Schaltungs- und Signalverarbeitung klar: Messung der Frequenz eines Sinussignals am Mischer-ZF-Ausgang.
In diesem Kapitel wird die für diese Aufgabe erforderliche Leiterplattenrealisierung vorgestellt.
Das kostengünstige Radarmodul K-LC5, das den Kern dieser Anwendung bildet, wird von der Firma RFBeam hergestellt.
Das Radarmodul umfasst alle Komplexitäten der Mikrowellenteile, sodass die Projektherausforderungen im Bereich der Niederfrequenzelektronik und Signalverarbeitung bestehen bleiben.
Die Hard- und Software hat die Aufgabe, die Frequenz des Mischer-ZF-Ausgangssignals zu messen, den gemessenen Frequenzwert in einen Geschwindigkeitswert umzuwandeln und die Geschwindigkeit auf einer 7-Segment-LED-Anzeige anzuzeigen.
Die für diese Funktionalität erforderlichen Haupthardwareteile werden mit einem aktiven Filter, einem AD7680-A / D-Wandler von Analog Devices und einem digitalen Signalcontroller der Serie dsPIC33E von Microchip realisiert.
Das Schaltbild der Schaltung ist in Abbildung 2 dargestellt. Der ZF-Ausgang des Radarmoduls ist über ein aktives Bandpassfilter mit dem A / D-Wandler verbunden.
Der Filter wurde mit dem LTSpice-Simulator von Linear Technology entworfen und simuliert. Das halbe Leistungsband des Filters deckt den Frequenzbereich von 70 Hz bis 13 kHz ab.
Die oben dargestellte Doppler-Verschiebungsformel kann verwendet werden, um zu berechnen, dass die maximale Doppler-Frequenz einer Geschwindigkeit von ungefähr 80 m / s entspricht, d. H. Ungefähr 300 km / h.
Diese Geschwindigkeit ist hoch genug, wenn das Radar verwendet wird, um beispielsweise die Geschwindigkeit eines Balls oder eines Fahrrads zu messen.
Die Spannungsverstärkung der Schaltung beträgt 10, um das Signal am Eingang des A / D-Wandlers auf einen geeigneten Pegel zu verstärken.
Die simulierte Schaltung mit den ausgewählten Komponentenwerten ist in Abbildung 3 dargestellt. Das gefilterte und verstärkte ZF-Ausgangssignal des Radarmoduls wird mit dem AD7680-A / D-Wandler abgetastet.
Dieser Wandler ist ein sukzessiver 16-Bit-Näherungswandler mit einer maximalen Abtastfrequenz von 100 kHz. In dieser Anwendung wird die Konvertierung vom dsPIC auf der Grundlage eines Timers mit einer Frequenz von 60 kHz initiiert.
Das Konvertierungsergebnis wird über eine serielle SPI-Schnittstelle gelesen.
Zusätzlich zum Abtastprozess des A / D-Wandlers steuert der digitale Signalcontroller auch die Leistungsschalter des Radarmoduls und drei gemultiplexte Siebensegmentanzeigen.
Das Radarmodul misst ungefähr acht Mal pro Sekunde. Wenn das Modul nicht gemessen wird, wird die Stromversorgung über einen Lastschalter abgeschaltet, der N- und P-Kanal-MOSFETs in einem einzigen Gehäuse integriert.
Dieselbe Art von Lastschalter wird zum Multiplexen von drei Siebensegmentanzeigen verwendet.
Der gemeinsame Anodenstift der aktiven Anzeige ist eingeschaltet, während die beiden anderen Anzeigen ausgeschaltet sind.
Die Kathodenpins der Displays werden über BJT-Transistoren angesteuert. Die Platine wird von einer 9V Batterie gespeist.
Die Batteriespannung wird direkt zur Ansteuerung der sieben Segmentanzeigen verwendet.
Ein Linearregler erzeugt 5V Spannung für das Radarmodul. Ein Schaltregler wird verwendet, um 3,3 V Spannung für den dsPIC und seinen Referenzoszillator zu erzeugen.
Ein weiterer Linearregler erzeugt eine rauscharme Spannung von 2,7 V ab 3,3 V für die Operationsverstärker und den A / D-Wandler.
Software-Betrieb
Der Software-Quellcode [3] der Hauptfunktion ist in eine Handvoll Unterfunktionen unterteilt, die in diesem Kapitel beschrieben werden.
Nach dem Power On Reset wird das System initialisiert.
Dies umfasst die Initialisierung der dsPIC-Pins, die Zeitgeber- und Unterbrechungsoperation sowie die Initialisierung der FFT-Verarbeitung.
Nach der Initialisierung tritt der Prozessor in die Verarbeitungsschleife ein.
Jede Verarbeitungsschleife beginnt damit, das Radarmodul einzuschalten und eine Weile zu warten, bis sich der Modulbetrieb stabilisiert hat.
Danach werden 512 Abtastwerte vom A / D-Wandler in einem Array von 16-Bit-Ganzzahlwerten erfasst.
Sobald sich die Daten im Puffer befinden, wird das Radarmodul ausgeschaltet, um während der Pufferbearbeitungszeit Batteriestrom zu sparen.
Die Pufferverarbeitung enthält eine Fourier-Transformationsberechnung der Daten in dem Puffer.
Microchip bietet eine DSP-Bibliothek mit der Microchip C30 Toolsuite für dsPICs.
Funktionen aus dieser Bibliothek dienen dazu, den Datenpuffer zu öffnen, die FFT zu berechnen und die Ausgabedaten zu mischen, um sie in eine logische Reihenfolge zu bringen.
Da die Eingangswerte der FFT real (nicht komplex) sind, enthält die erste Hälfte des Datenpuffers, Elemente 0-255, die Nutzdaten, während die andere Hälfte redundant ist.
Jedes Element des Arrays entspricht einem Frequenzwert von i * Fs / 512, wobei i der Elementindex und Fs die Abtastfrequenz (60 kHz) ist.
Die Frequenzdifferenz zwischen den Frequenzbereichen des FFT-Ausgangs beträgt ungefähr 117 Hz.
Nach der Doppler-Verschiebungsformel entspricht dies einer Geschwindigkeit von etwa 0,73 m / s, was der Auflösung der Geschwindigkeitsmessung dieses Doppler-Radars entspricht.
Die FFT-Berechnung erzeugt ein Array von fraktionierten komplexen Zahlen.
Die Signalamplitude, die für diese Anwendung von Interesse ist, kann berechnet werden, indem die Quadratwurzel aus der Summe der quadrierten Real- und Imaginärteile gebildet wird.
Eine rechenintensive Quadratwurzelberechnung kann durch Verwendung einer Näherungsformel für die Amplitudenberechnung vermieden werden.
Es gibt verschiedene Methoden, um die ungefähre Größe einer komplexen Zahl zu berechnen. Ich habe die in Lit. [4] vorgestellte Equiripple-Error-Approximationsmethode verwendet.
Eine detaillierte Näherungsformel finden Sie in den Software-Quellcode-Kommentaren [3].
Zu diesem Zeitpunkt ist der Signalamplitudenwert an jedem FFT-Frequenzbereich bekannt. Befindet sich im Radarantennenstrahl ein Ziel, wird ein Signal mit einer Frequenz ausgegeben, die der Zielgeschwindigkeit entspricht.
Dieses Signal kann erkannt werden, weil die FFT-Ausgangsamplitude die Erkennungsschwelle am entsprechenden Frequenzbereich überschreitet.
Wenn keine Ziele vorhanden sind, ist nur Rauschen vorhanden und die Amplitudenwerte liegen unter der Erkennungsschwelle.
In dieser Anwendung gibt es eine feste Erkennungsschwelle, die experimentell so eingestellt wurde, dass Fehlerkennungen nur selten vorkommen.
Die letzte Stufe der Verarbeitung sucht, welche Frequenzbereiche eine Signalamplitude haben, die den Schwellenwert überschreitet.
Die Detektion mit dem höchsten Index im Amplitudenfeld entspricht der höchsten Zielgeschwindigkeit.
Der Array-Index dieser Erkennung wird gespeichert, und sein Wert wird zu Anzeigezwecken etwa eine Sekunde lang gehalten.
Dies ist wichtig, um die höchste gemessene Geschwindigkeit zu ermitteln, ohne dass die Anzeige zwischen allen gemessenen Geschwindigkeiten flackert.
Der Amplituden-Array-Index wird unter Verwendung einer vorberechneten Nachschlagetabelle in Geschwindigkeitswerte in km / h-Einheiten umgewandelt.
Die Mess- und Verarbeitungsschritte dauern ca. 30 ms. Nach jeder Messung wartet der Prozessor und aktualisiert die Anzeige für etwa 100 ms, bevor er einen neuen Mess- und Verarbeitungszyklus startet.
Daher wird die Messung ungefähr achtmal pro Sekunde durchgeführt.
Montage und Prüfung
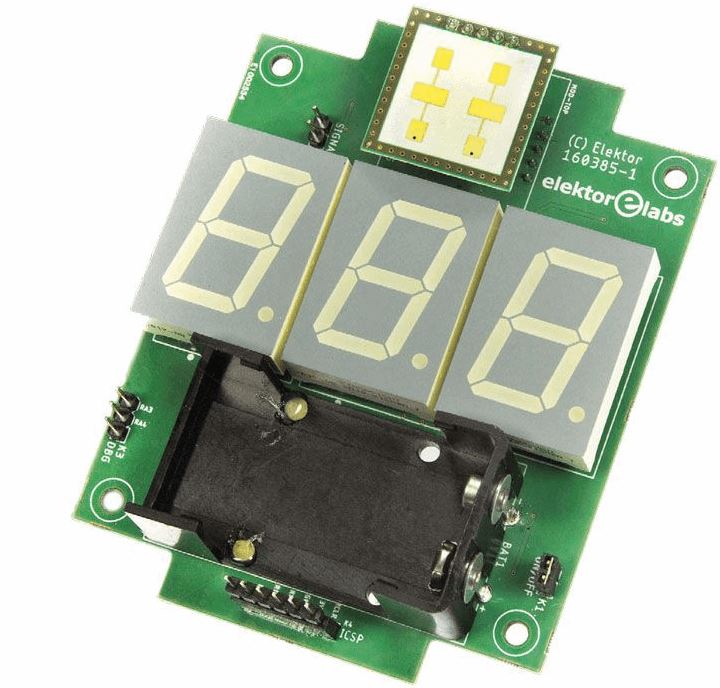
Die Leiterplatte ist eine doppelseitige Leiterplatte mit den Abmessungen 89 x 75 mm.
Das Radarmodul und die sieben Segmentanzeigen sind auf der Oberseite und alle anderen Komponenten sowie der Batteriehalter auf der Unterseite der Platine montiert.
Die meisten Komponenten sind oberflächenmontierte Komponenten. Das Paket des dsPIC besteht aus 28-poligem SSOP mit einem Abstand von 0,65 mm, und das Löten von Hand kann etwas schwierig sein.
Mit einem guten Lötkolben lassen sich jedoch auch bescheidene Mikroskope und zum Teil auch kleinste Bauteile auf der Platine adäquat verlöten.
Das von mir verwendete dsPIC ist auch in DIP- und SOIC-Gehäusen erhältlich, aber nachdem ich einige Erfahrungen mit dem Löten kleiner SMD-Bauteile gesammelt habe, bevorzuge ich kompaktere Bauteile.
Die Leiterplatte ist in einer Kunststoffbox montiert, die eine durchsichtige Abdeckung hat.
Das Display ist durch die Abdeckung gut sichtbar, während die Elektronik beispielsweise vor Ballschlägen geschützt ist.
Das Radar wurde in einem Floorball-Training getestet und es wurde festgestellt, dass es aus mehreren Metern Entfernung eine Plastikkugel mit ca. 7 cm Durchmesser erkennen kann.
Ein Auto kann in einer Entfernung von etwa 50 bis 100 Metern erkannt werden. Ich habe die Genauigkeit der Geschwindigkeitsmessung nicht gründlich überprüft,
aber zumindest die Geschwindigkeitsmessungen entsprachen den vom Tachometer meines Autos angegebenen Geschwindigkeiten.
Abschließende Gedanken
Ich bin sehr zufrieden mit den Ergebnissen dieses Projekts - das Endprodukt ist zumindest ein schönes Spielzeug und hat auch in vielen anderen Anwendungen Potenzial.
Das Projekt erwies sich auch als sehr lehrreich.
Dies war das erste Mal, dass ich einen digitalen Signalregler verwendete. In früheren Projekten habe ich 8-bit Mikrocontroller und größere Prozessoren verwendet, wie sie in Raspberry Pi- und Beaglebone-Boards verwendet wurden.
Es dauerte einige Zeit, bis die FFT-Verarbeitung, die den Kern der Signalverarbeitung in dieser Anwendung darstellt, betriebsbereit war.
Erklärende Beispiele und Dokumentationen von Microchips halfen bei dieser Aufgabe.
Der digitale Signalcontroller hat sich bei dieser Art von Signalverarbeitungsaufgabe als einigermaßen effizient erwiesen und kann für zukünftige Projekte eine interessante Ergänzung meiner Toolbox sein.
Wenn das Radarmodul Ihr Interesse geweckt hat, ist es nicht notwendig, sofort eine Leiterplatte zu bauen.
Ich begann mit dem Modul zu experimentieren, indem ich die IF-Ausgänge des Radarmoduls mit der Soundkarte meines PCs verband.
Im PC habe ich die SDR # -Software verwendet, die das Soundkartensignal als Eingabe akzeptiert und schöne Spektrums- und Spektrogrammanzeigen zur Überprüfung des Frequenzinhalts des Signals hat.
Mit dieser einfachen Einrichtung können Sie eine gute Vorstellung davon bekommen, wie das Radarmodul funktioniert und welche Ziele damit erfasst werden können.
Verweise
1) Gregory L. Charvat: Die Zukunft der Kleinradartechnologie, Circuit Cellar, April 2014.
2) K-LC5 Radar Transceiver Datenblatt, RFbeam Microwave GmbH,
https://www.rfbeam.ch/files/products/9/downloads/Datasheet_K-LC5.pdf
3) Software-Quellcode für dsPIC33EP128GP5024) Richard G. Lyons (Hrsg.), Streamlining Digital Signal Processing, IEEE Press, 2007.
300_d_elektor-x_160385-11 Experimentelles DopplerRadar - Software_1a.zip
300_d_elektor-x_160385-11 -v03072018 Experimentelles DopplerRadar - Software_1a.zip
300_d_elektor-x_160385-11Test Measurements with the Experimental Doppler-Radar_1a.pdf
300_d_elektor-x_160385-11 Experimentelles Doppler-Radar - Platine_1a.pdf
300_d_elektor-x_160385-11 Experimentelles Doppler-Radar - Software_1a.zip
https://www.elektormagazine.de/magazine/elektor-201807/41684
https://www.elektormagazine.de/labs/experimental-doppler-radar-160385 https://www.elektor.de/experimental-doppler-radar-module-160385-91
Updates (3) Assembled boards are here, info about K-LC5 and K-LC2 Projektinhaber ClemensValens 28. November 2018, 08:07 Uhr The assembled boards have finally arrived in our shop: https://www.elektor.com/experimental-doppler-radar-module-160385-91 Please note that the K-LC5 Doppler radar transceiver module (shop ref. SKU18757) currently (Q4 2018) has an availability problem. We have been promised a new batch soon, but we are still waiting. A new version of the K-LC5 is announced for Q2 2019. In the meantime we are working on adding to our shop an alternative in the shape of the pin-compatible K-LC2 module (shop ref. SKU18510, coming soon). The K-LC2 is identical to the K-LC5 except for a somewhat shorter range and a lower price. We have tried it succesfully with our Doppler radar board. Hermann 17. Dezember 2018, 11:43 Uhr Hi Clemens, nice project, du you have a Software for measure the distance? I have ordered a Radar module. Regards Hermann Projektinhaber ClemensValens 18. Dezember 2018, 08:32 Uhr It is a Doppler radar, it only detects moving objects. The transceiver module outputs a signal when, due to movement, the frequency of the reflected pulse differs from the transmitted pulse. Because it does not output the trigger pulse itself, you can't measure the time between the TX pulse and the arrival at the antenna of the reflection. Distance measurements are therefore not possible with this radar. Using the received signal level is also not possible because that depends on the radar cross section of the object, i.e. its capacity to reflect the TX pulse. A truck does not have the same refelctivity as a human being. Only if the radar cross section is always exactly the same (identical objects, identical angle of incidence, etc.) can you try to do an estimate of the distance based on signal level (if other conditions don't change). Michel DUC 18. Dezember 2018, 20:11 Uhr To measure distance it is necessary to use FMCW . To do this you have to drive the VCO of the K-LC5 with a rising ramp and falling ramp and to analyze the return signal. Its is described by a RFBeam appplication note and also in different documentations on the web. The sofware is pretty complex to design and it could take time to create and test it. The bandwith of the VCO in accordance with regulation doesnt allow a precision better han 60 cm to 1 meter. A RFBeam module doing that will come soon ... Best Regards
Weniger anzeigen
Update PCB revision 1.2 & 1.3 Projektinhaber ClemensValens 7. August 2018, 10:56 Uhr The PCB you buy from Elektor is currently at revision v1.2 or v1.3 (identical on an electrical level): All passive components are 0805 unless specified otherwise. L1 is a Bourns SRR4828A-150M or equivalent. R45 (47 ohms) is new and therefore not mentioned in the parts list in the article. This resistor helps reducing switching noise of IC11. R44 on the previous revision has become R42 on v1.2/v1.3 while R44 has become R42 on v1.2/v1.3 (unfortunate swapping of references). R44 is for testing purposes only and should not be mounted. R42 is only to be mounted when IC11 is used instead of IC4 (see below). For completeness sake The complete reference for IC4 is ADP2370ACPZ-3.3-R7, which was abbreviated in the article to ADP2370-3.3. The ADP2370 is the adjustable version, which will not work here. Note that the Dutch article incorrectly lists IC4 as an ADP150. As mentioned in the article there are two options for the 3V3 voltage regulator. DO NOT MOUNT BOTH! 3V3 option 1 (difficult to solder, less parts) IC4, R29 Do not mount the parts mentioned under Option 2 3V3 option 2 (easier to solder, more parts) D2, D3 C19, C20, C21 IC11, R42, R43, R45 Do not mount the parts mentioned under Option 1 Weniger anzeigen New firmware v03072018 Projektinhaber ClemensValens 3. Juli 2018, 09:16 Uhr It was found that a longer delay between switching on the radar transceiver module and the start of sampling improved the precision. The firmware v03072018 (see download section above) waits 10 ms instead of 0.5 ms. This has a slight impact on the current consumption that is around 50 mA when one digit is being displayed. The display now flickers a little bit, which indicates that you are indeed using the new software. Note that the Elektor Magazine article mentions a sample rate of 60 kHz. This is not completely true as the software sums samples three by three. The effective sample rate is therefore 20 kHz and the frequency resolution 39 Hz; the speed resolution is about 0.87 km/h. gfbreaban 4. Juli 2018, 07:19 Uhr Hello, My hobby is electronics. From 1 week I try to buy the components... is not easy... Thanks for help... Best regards, Florin (from Beuvry, N. of French) Projektinhaber ClemensValens 4. Juli 2018, 08:36 Uhr With a bit of luck we will soon have the assembled board in our shop. We are working on it. gfbreaban 4. Juli 2018, 17:29 Uhr Thanks for the good news! Best regards, Florin DanyR 24. Juli 2018, 13:15 Uhr Hi Clemens, Do you think it would also be possible to measure the mixer output frequency also with a less complex PIC (no digital signal controller), e.g. by measuring the time between 2 zero crossings? (of course the bandpass amplifier should be kept I think). Did you do (e.g. in the early stages of the project) investigations in this direction? Thanks in advance! Projektinhaber ClemensValens 24. Juli 2018, 15:15 Uhr The output of the sensor is a smallish low-frequency signal but not a clean sine wave as it is the sum of all the doppler frequencies detected in noise. Detecting periods is difficult and would only work with strong signals. Applying an FFT greatly improves sensitivity. Michel DUC 10. Oktober 2018, 07:27 Uhr Hello I just discover your article and it is interesting; I am working for a company who sells electronic components in france and also RFBeam modules. Your board is interesting as you are using a microcontroller to do signal digital processing and FFT to improve a lot sensibility, reliability of the detection. As you know it is also possible a digital component referenced as RSP1 developped by RFbeam to to FFT processing and also others processing tasks and in this case it is possible to send command and get detection results by a serial link. But of course the cost of the RSP1 is higher that the PIC . Would be fine to propose an updated version of your board with FMCW modulation to be able to determine distance but also multi- targets and static objetcs. As you said this is possible with the K-LC5 as the VCO is externally accessible. in all the cases you did a great work . congratulations ! Weniger anzeigen Kommentare (2) K-LC7 Edward Rossy 28. November 2018, 20:32 Uhr Would this also work with the K-LC7? And would you be able to source that item as well from RFbeam? 2 Kommentare Edward Rossy 28. November 2018, 21:00 Uhr Or better yet., the K-LD2. Projektinhaber ClemensValens 29. November 2018, 09:40 Uhr We are currently evaluating the K-LD2, but it will be some €150 when (if) we get it in our shop... The K-LC7 is a 2-channel device and is not compatible with our system. Weniger anzeigen Doppler radar Klaus Talaga 25. Juli 2018, 07:23 Uhr I'm also waiting for the loaded board. Give gas! 12 Kommentare Projektinhaber ClemensValens 26. Juli 2018, 06:44 Uhr Production has been launched, the assembled boards should arrive in a few weeks. DanyR 27. Juli 2018, 10:38 Uhr Looking forward to it... apple 6. August 2018, 13:53 Uhr I got the parts and after getting the last one (PIC from elektor, took over month) I started assembling. There are some errors in the published article, R45 on print, should be R44; part list for ic4 is wrong, should be adp2370. For the smd Rs and Cs, sizes are missing, ditto info about L1 (xxx mA or make?) The programmed pic I received, had a kind of white paint on first 6 pins. I thought it was solderable, but that was a mistake, it spread out over pins and print... this was my first buy of a programmed ic from Elektor, how can I clean this best? Is it the latest version, or should I not bother cleaning and re-order? btw, all parts were provided by Mouser, in a few days Projektinhaber ClemensValens 7. August 2018, 10:52 Uhr @apple: thank you for pointing out these issues. Unfortunately the information you provide is incorrect. Please read on carefully. The PCB you buy from Elektor is currently at revision v1.3. All passive components are 0805 unless specified otherwise. L1 is a Bourns SRR4828A-150M or equivalent. R44 on the previous revision has become R42 while R44 has become R42 (unfortunate swapping of references). R44 is for testing pruposes only and should not be mounted. R42 is only to be mounted when IC11 is used instead of IC4 (see below). The complete reference for IC4 is ADP2370ACPZ-3.3-R7, which was abreviated in the article to ADP2370-3.3. The ADP2370 is the adjustable version, which will not work here. As mentioned in the article there are two options for the 3V3 voltage regulator. DO NOT MOUNT BOTH! Option 1 (difficult to solder, less parts) IC4, R29 Do not mount the parts mentioned under Option 2 Option 2 (easier to solder, more parts) D2, D3 C19, C20, C21 IC11, R42, R43, R45 Do not mount the parts mentioned under Option 1 R45 (47 ohms) is new and therefore not mentioned in the parts list in the article. P.S. No idea what the white stuff on the pins of the microcontroller was. apple 7. August 2018, 11:52 Uhr Thanks for this update! Indeed R42 (not R45 as I said in earlier comment) on print became R44 (10K). Do note that in the part list, IC4 info is wrong. The diagram is a bit better (ADP2370) and your update clears it all. I got print V1.2. What changed in V1.3? Projektinhaber ClemensValens 7. August 2018, 14:25 Uhr V1.3 is the same as V1.2, but the count was upped by .1 for production reasons. The white stuff on your controller might be the ink that we use to mark pin 1 when the chip was programmed. Usually we use only a little bit, but maybe on your device it was too much. Regarding the parts list, I must be thick, but I have checked the English & French articles and to me they look OK as both mention the ADP2370-3.3 for IC4. The schematic mentions ADP2370 which might be considered incomplete. apple 7. August 2018, 18:25 Uhr Part list: I have the Dutch article; I did not realize there are differences in the various languages... Dutch magazine, page 53: IC4*= ADP150AUJZ-3.0-R7 (wrong) Dutch magazine, page 51 IC4 identified as ADP2370 (better) Projektinhaber ClemensValens 16. August 2018, 07:56 Uhr (back from holidays) This article was produced in English, then translated to the other languages. No idea why the Dutch parts list lost a '3' in translation. Still, this reference is better than yours because it is for a fixed-voltage regulator whereas 'ADP2370' indicates an adjustable regulator. The board was designed for the fixed-voltage version. Furthermore, the board will work with the given 3V regulator, even though 3V3 is preferred. apple 17. August 2018, 14:29 Uhr I hope you had a good holiday. I was just reacting to your statement 'I must the thick' and was pointing you to the error in the NL list for IC4; and that is not missing a '3', the whole reference in front is wrong: the NL listing says ADP150..., that must be ADP2370.... Projektinhaber ClemensValens 17. August 2018, 19:48 Uhr OK, so I am thick, sorry. This is a strange mistake as it is correct in all other languages. Every language editor adapts the parts list to the language standards. Something clearly went wrong here. Thank you for pointing it out. Edward Rossy 26. November 2018, 18:14 Uhr Please provide an update as to the status of the assembled boards? Projektinhaber ClemensValens 28. November 2018, 08:01 Uhr Thank you for your patience. You must be psychic ;-), the assembled boards have arrived yesterday in our shop: https://www.elektor.com/experimental-doppler-radar-module-160385-91
Weniger anzeigen
********************************************************I*
Nr. 39 – Doppler-Radar Modul RCWL-0516Das Doppler-Radar Modul RCWL-0516 ist ein hochsensibler Radarsensor mit einem Erkennungsbereich von ungefähr 5-7 Metern. Dem Datenblatt des Herstellers konnten wir entnehmen, dass der Wirkungsbereich ungefähr 120° umfasst. Im Selbsttest konnte das Modul sogar Bewegungen in einem Umkreis von bis zu 200° erkennen und verwerten.
Den Namen erhielt das Modul, weil die verwendete Radar-Technologie auf dem sogenannten Doppler-Effekt beruht. Grob bedeutet dies, dass das Radar die Frequenzänderung eines gesendeten und reflektiertem Signal messen kann, also erkennt, ob und wie schnell sich ein gegebenes Objekt annähert oder distanziert. Diese Technik findet man im Alltag zum Beispiel bei Radarfallen (ugs. Blitzer) wieder. Weitere Informationen zur Wirkungsweise des Doppler-Radars finden Sie hier. Das Modul ist sehr einfach zu verwenden, da es über eine interne Elektronik die gemessene Bewegung auswertet und verarbeitet wird. Sobald eine Bewegung detektiert wurde gibt das Modul für ca. 2 Sekunden eine Spannung am „OUT“ Pin aus. Dieses Signal wird dann vom Arduino Mikrocontroller verarbeitet.
Das RCWL-0516 Modul hat eine Standard Auslösezeit von 2 Sekunden. Das bedeutet, dass das Modul für ein HIGH-Signal ausgibt, sobald es eine Bewegung erfasst hat. Die Sensibilität für das Auslösen des Triggers kann durch die Verwendung eines Widerstandes am Output-Pin verringert werden.
Aufgabe : Ausgabe des Bewegungsstatus am Seriellen Monitor Das Modul wird wie folgt am Mikrocontroller angeschlossen :
3V3 – kein Anschluss am Mikrocontroller notwendig Sketch int Radarmodul = 8;int WERT;void setup() { Serial.begin(9600); pinMode (Radarmodul, INPUT);}void loop() { WERT = digitalRead(Radarmodul); Serial.println(WERT); delay(100);} Das Ergebnis ist am Seriellen Monitor zu erkennen. Wenn hier eine „0“ erscheint, wurde keine Bewegung detektiert. Bei einer „1“ wurde eine Bewegung erkannt. Mit diesem Sketch wird die grundlegende Einsatzmöglichkeit und die Funktion des Moduls deutlich. Mit der folgenden Aufgabe soll der Arduino Mikrocontroller die Daten des Radarsensors nutzen, um einen „Alarm“ in form eines Tonsignals auszulösen.
Aufgabe : Eine LED soll aufleuchten, solange der Trigger (also ein HIGH-Signal) erfasst wurde.
Sketch: int Radarmodul = 8; // OUT des Radarmoduls an Pin 8 des Mikrocontrollersint Piepser=7; // "+" des Piezo-Lautsprecher an Pin 7int WERT; // Variable für den Messwertvoid setup() { Serial.begin(9600); pinMode (Radarmodul, INPUT); pinMode (Piepser, OUTPUT);}void loop() { WERT = digitalRead(Radarmodul); Serial.println(WERT); if (WERT >0 ) {digitalWrite(Piepser, HIGH); // Schalte den Piezo-Lautsprecher an.delay(1000); // Warte 1000 Millisekunden. (Es piepst)digitalWrite(Piepser, LOW); // Schalte den Piezo-Lautsprecher aus.delay(5000); // Warte 5000 Millisekunden. Danach beginnt der Loop erneut. }}
300_d_funduino-x_Doppler-Radar Modul RCWL-0516_1a.pdf
https://funduino.de/nr-39-doppler-radar-modul-rcwl-0516
********************************************************I*
http://www.hjberndt.de/soft/radar/indexfall.html
********************************************************I*
300_d_Berndt-x_Radarfalle - Geschwindigkeitsmessung mit ARDUINO - Doppler-Radar-Sensor IPM-165_1a.pdf
http://www.hjberndt.de/soft/radar/index.html
********************************************************I*
Frequenzzähler mit Arduino An manchen Schulen werden Zählraten und andere Ereignisse im Praktikum gemessen. Ein GM-Zählrohr liefert Impulse, die der Intensität von z.B. Gamma-Stahlen entsprechen. In der Mechanik können Geschwindigkeiten mittels Speichenrad in eine Frequenz gewandelt werden. Interferenzübergänge erlauben Aussagen zu optischen Weglängenänderungen. 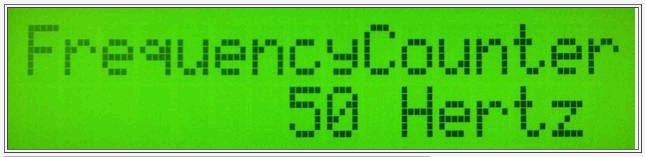
Arduino zeigt die Netzfrequenz bei offenem Eingang auf einem LCD-Display.
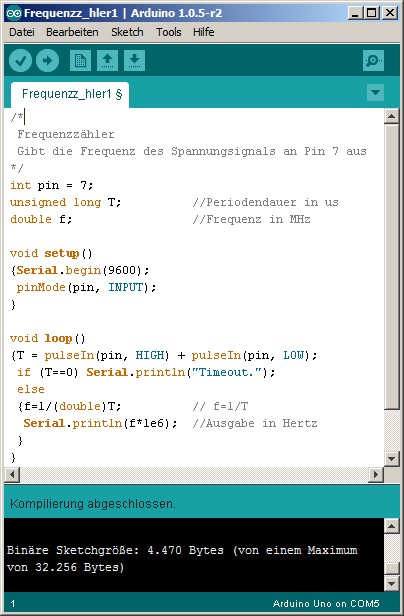 Ein Blick in die Referenz auf arduino.cc zeigt bei den Eingaben unter 'Advanced I/O' die Funktion pulseIn(). Die Beschreibung sagt, dass mit dem Aufruf pulseiIn(pin, HIGH) gewartet wird, bis das Signal an dem Eingangs-Pin (pin) auf Logikpegel HIGH geht. Dann wird ein Timer gestartet und gewartet bis der Pegel LOW erreicht wird. Die verstrichene Zeit wird in Mikrosekunden zurück geliefert. Etwas anders ausgedrückt: puseIn(pin,HIGH) liefert die Impulsdauer ti. Die Impulspause tp kann mit pulsIN(pin,LOW) ermittelt werden. Die Periodendauer T ergibt sich aus T = ti+ tp. Bei einem symmetrischen Rechtecksignal ist ti = tp, also die Zeit für HIGH-Pegel gleich der Zeit für LOW-Pegel. Die Funktion kehrt bei einem Timeout mit dem Wert 0 zurück, womit auch bei fehlendem Signal das Programm fortgesetzt werden kann. Der Kehrwert der Periodendauer T entspricht der Frequenz f. Aus Mikrosekunden (1e-6) werden Megahertz (1e6). Um eine Anzeige in Hertz zu erreichen wird mit 1e6 multipliziert. Hier der Sketch. /* Frequenzzähler Gibt die Frequenz des Spannungsignals an Pin 7 aus */int pin = 7;unsigned long T; //Periodendauer in usdouble f; //Frequenz in MHz void setup() {Serial.begin(9600); pinMode(pin, INPUT);}void loop() {T = pulseIn(pin, HIGH) + pulseIn(pin, LOW); if (T==0) Serial.println("Timeout."); else {f=1/(double)T; // f=1/T Serial.println(f*1e6); //Ausgabe in Hertz } }
Probe mit DSO-Quad
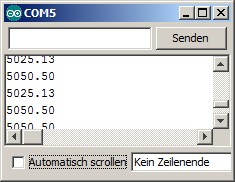
Das Hosentaschenoszilloskop 'DSO-Quad' mit seinem eingebauten Frequenzgenerator soll als Testsignalgeber dienen. Die Rechteckfrequenz kann in weiten Bereichen eingestellt werden. Mit zwei Verbindungen kann der Test beginnen. Masse an Masse und Generatorausgang vom Quad an Pin 7 des Arduino. Bei der Frequenz 5000 Hz wird in der Tat auch ein Wert um 5025 angezeigt. Wer da jetzt im Recht ist, müsste eine Kalibrierung zeigen. Für einfache Messungen sollte das jedoch zunächst reichen.
Ratemeter oder Impulszähler 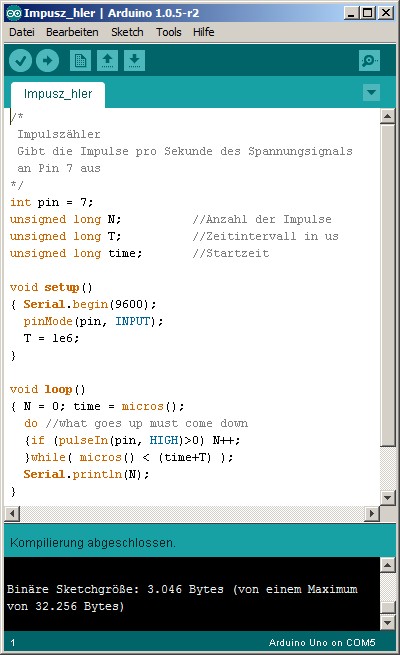
Bei parallel laufenden, freien Praktika kann es vorkommen, dass plötzlich alle Impulszähler in Gebrauch sind. Abhilfe schafft da ein kleiner Arduino mit einem kleinen Sketch. Impulsraten sind Ereignisse aperiodischer Signale pro Zeiteinheit, wie zum Beispiel die Impulsfolge eines Geiger-Müller-Zählrohrs.
In wenigen Zeilen wird hier mittels pulseIN() und micros() die Impulsrate an Pin 7 gemessen. Als Zeitintervall T ist hier eine Sekunde, bzw. 1000000 (1e6) Mikrosekunden voreingestellt. In der Hauptschleife wird die Einzelmessung initialisiert und dann während des Zeitintervalls T mittels pulseIn() auf eine ansteigende Flanke gewartet. Anschließend enthält N die Anzahl der Impulse pro Sekunde und wird via Serial.println gesendet. Benutzt man symmetrische Signale (Rechteck, Sinus, Dreieck), so ergeben sich bei beiden Zählervarianten gleiche Ergebnisse, obwohl sie anders funktionieren. Durch Änderung der Variablen T kann die Messdauer verändert werden. Für eine Zähldauer von z.B. 10 Sekunden würde T = 10*1e6 betragen. Hier der Sketch. /* Impulszähler Gibt die Impulse pro Sekunde des Spannungsignals an Pin 7 aus */int pin = 7;unsigned long N; //Anzahl der Impulseunsigned long T; //Zeitintervall in usunsigned long time; //Startzeitvoid setup() { Serial.begin(9600); pinMode(pin, INPUT); T = 1e6;}void loop() { N = 0; time = micros(); do //what goes up must come down {if (pulseIn(pin, HIGH)>0) N++; }while( micros() < (time+T) ); Serial.println(N);}LCD-Anzeige Wie beim 'Arduino als Zollstock' macht eine LCD-Anzeige die Messanordnung autonom. Auf einem 2x16-Display erfolgt die Darstellung durch Einbindung der 'LiquidCrystal'-Bibliothek, die unter http://arduino.cc/en/Tutorial/LiquidCrystal beschrieben ist. Das gesamte Programm wird dadurch kaum länger. Hier die Variante für den Frequenzzähler. Da die Umlaute wieder Probleme machen, zeigt das Display 'FrequencyCounter'. Bei offenem Eingang fängt sich der Zähler hier die Netzfrequenz ein. /* Frequenzzähler Gibt die Frequenz des Spannungsignals an Pin 7 aus */#include <LiquidCrystal.h>int pin = 7;unsigned long T; //Periodendauer in usdouble f; //Frequenz in MHz char fm[] = " %8ld Hertz";LiquidCrystal lcd(12, 11, 5, 4, 3, 2);void setup() { lcd.begin(16, 2); pinMode(pin, INPUT); lcd.print("FrequencyCounter");}void loop() { char s[20]; // Messen von ti + tp = T T = pulseIn(pin, HIGH) + pulseIn(pin, LOW); T == 0 ? f = 0 : f=1/(double)T; sprintf(s,fm,(unsigned long)(f*1e6)); lcd.setCursor(0, 1); lcd.print(s); delay(200);}
300_d_Berndt-x_ARDUINO als Zähler - Frequenzzähler mit ARDUINO_1a.pdf
http://www.hjberndt.de/soft/ardfreq.html
DIN A4 ausdrucken
********************************************************I*
Impressum: Fritz Prenninger, Haidestr. 11A, A-4600 Wels, Ober-Österreich, mailto:[email protected]ENDE |




 erscheint nun ein erster Messwert mit
erscheint nun ein erster Messwert mit

 Geschwindigkeits-messung mit
Geschwindigkeits-messung mit