|
http://sites.schaltungen.at/sie-fahren-km-h/weidmann
Wels, am 2018-05-18BITTE nützen Sie doch rechts OBEN das Suchfeld [ ] [ Diese Site durchsuchen]DIN A3 oder DIN A4 quer ausdrucken
*******************************************************************************I** DIN A4 ausdrucken (Heftrand 15mm / 5mm) siehe http://sites.schaltungen.at/drucker/sites-prenninger
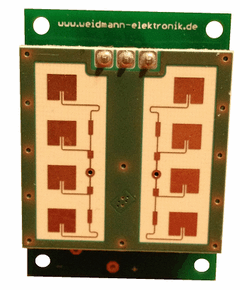
********************************************************I* ~015_b_PrennIng-a_sie.fahren.km.h-radarsensor (xx Seiten)_1a.pdfWeidmann Elektronik IPM-165 Sensor der Fa. InnoSenT - - RSM-1650 Sensor der Firma Hygrosens http://shop.weidmann-elektronik.de/index.php?page=index Radar Evaluation Board REB165_1 - Geschwindigkeitsmessung Eine Geschwindigkeitsmessung von PKWs / Autos mit dem Lowcost 24 GHz Radarsensor RSM-1650 / IPM-165. Radarsensor Geschwindigkeitsmessung PKW/Auto mit Atmel AVR Atmega1284P Microcontroller https://www.youtube.com/watch?v=LUCrDOBE5y8 http://www.weidmann-elektronik.de https://www.youtube.com/watch?v=RSAj_ydbg48 RAD165 (= IPM-165 mit Verstärkerschaltung € 27,99 vorhanden)
Radarsensor 165 inkl. Verstärkung (73 dB) € 22,99
|

|

|
|
Wenn man das Wort "Radar" hört, denkt man schnell an einen Monitor mit grünen Punkten oder an das böse Polizeiradar.
|

|
|
Viele von euch wissen garnicht, dass sie täglich mit Radarsensoren konfrontiert werden. Zum Beispiel in Form eines automatischen Türöffners. Radarsensoren sind mittlerweile auch für Hobbybastler bezahlbar geworden und ich möchten euch gerne zeigen, was man mit Radarsensoren machen kann.
|
|
Was kann ich mit einem Radarsensor machen?
Je nachdem welche Art von Radarsensor man hat, kann man folgendes damit erfassen: 1. Erfassung von beweglichen und stehenden Objekten 2. Erfassung der Geschwindigkeit und Bewegungsrichtung von Objekten 3. Erfassung der Entfernung von beweglichen und stehenden Objekten Wie funktioniert ein Radarsensor? Ganz einfach erklärt sendet der Sensor ein Signal aus, welches das zu detektierende Objekt an den Sensor zurückreflektiert. Nun wird das empfangene Signal aufbereitet und uns in Form einer Frequenz zur Verfügung gestellt. Je nachdem aus welchem Material das Objekt besteht, reflektiert es besser oder schlechter. Ein Auto z.B. bietet ein perfektes Ziel. Doch auch Menschen lassen sich sehr gut erfassen.
Welche Vorteile hat Radar im Vergleich zu z.B. Infrarot oder Videotechnik?
- Radar ist unempfindlich gegen Umwelteinflüsse (z.B. Regen, Nebel, Hitze, Schnee).
Los gehts: |

|

|
| Bauteil | Wert | Beschreibung/Bauform/Conrad,ELV,Reichelt Link |
| RSM-1650 | - | Hygrosens RSM-1650 |
| Datenblatt | - | Hygrosens RSM-1650 Datenblatt |
| Applikationsschrift | - | Hygrosens RSM-1650 Applikationsschrift |
|
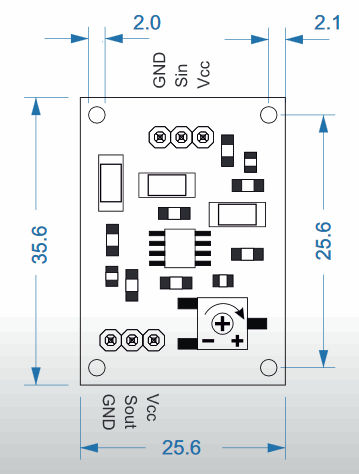
Nachdem wir uns den Sensor besorgt haben, stoßen wir schon auf die erste Hürde. Der Sensor scheint eigentlich ganz einfach zu sein. Es gibt nur 3 Pins VCC(+5V), GND, SIGNAL. Wenn wir jetzt aber den RSM-1650 anschließen, werden wir schnell feststellen, dass am Signalpin so gut wie überhaupt nichts rauskommt. Ist jetzt also der Sensor kaputt? Der Sensor ist in der Tat sehr ESD empfindlich und sollte sehr vorsichtig behandelt werden (nicht an den Pins anfassen), solange er noch nicht in einer Schaltung verbaut ist. Der Sensor benötigt aber desweiteren erstmal einen NF-Vorverstärker.
Wozu brauche ich einen NF-Vorverstärker? 1. Wir können zuerst einmal die Reichweite damit begrenzen (Verstärkung in dB verändern). Je höher wir verstärken, umso höher ist die Reichweite des RSM-1650. Aber Vorsicht! Je höher wir verstärken umso mehr geht das Rauschen hoch und wir bekommen bei der Auswertung Störsignale. Das kann man vergleichen mit einer mp3 Datei. Erhöht ihr die Lautstärke, ist die Musik wunderbar laut. Aber je lauter ihr dreht, umso mehr hört ihr ein lästiges Rauschen im Hintergrund. 2. Des Weiteren begrenzen wir das Freuquenzband (Hz) unseres Signals. Wir stellen z.B. unser Band auf 0-400 Hz. Ein Objekt welches sich mit 1 km/h nähert, erzeugt an diesem Sensor ein Ausgangssignal von ca. 44 Hz. Also könnten wir in unserem Fall nur Objekte erfassen, welche sich maximal mit 9 km/h bewegen. Das macht natürlich Sinn. Ein Fußgänger bewegt sich im Durchschnitt mit einer Geschwindigkeit von 5-6 km/h auf eine Türe zu. Es würde also keinen Sinn machen, wenn wir z.B. bei einem Türöffner Geschwindigkeiten von 200 km/h erfassen könnten. Ein anderer Fall wäre z.B. ein Polizeiradar. Hier möchten wir erst Geschwindigkeiten ab 20 km/h erfassen und keine Fußgänger sehen. Es macht also Sinn diesen Frequenzbereich zu begrenzen. Ohne große Berechnungsformeln und Erklärungen zur Berechnung eines NF-Verstärkers, hier der fertige Verstärker für unser erstes Beispiel. Die Größe habe ich auf unseren Sensor angepasst. Verstärker Eigenschaften:
Verstärkung: 73 dB (eine gute Reichweite bis ca. 10-15m für die Erfassung von Menschen) |

|

|

|

|
| Bauteil | Wert | Beschreibung/Bauform/Conrad,ELV,Reichelt Link |
| C1 | 4,7uF | SMD-Tantal-Kondensator |
| C2 | 1,5nF | Kondensator C0805 |
| C3 | 4,7uF | SMD-Tantal-Kondensator |
| C4 | 3,3nF | Kondensator C0805 |
| C5 | 22uF | SMD-Tantal-Kondensator |
| C6 | 100nF | Kondensator C0805 |
| R1 | 2,2K | Widerstand R1206 |
| R2 | 220K | Widerstand R1206 |
| R3 | 2,2K | Widerstand R1206 |
| R4 | 100K | Widerstand R1206 |
| R5 | 100R | Widerstand R1206 |
| R6 | 1K | Widerstand R1206 |
| R7 | 1K | Widerstand R1206 |
| SL2 | 3 Pin | Stiftleiste 03P |
| SL3 | 3 Pin | Stiftleiste 03P |
| IC | LMV358 | 2fach Operationsverstärker SO8 |
Layout:
| Eagle Layout und Schaltplan | NF-Verstaerker.zip |
|
Wichtig bei der Verstärkerschaltung: Die Werte der Widerstände und Kondensatoren müssen exakt so gewählt werden, wie beschrieben. Verwendet ihr andere Werte (weil z.B. zufällig kein 3,3nF da war), stimmen die Verstärker Eigenschaften nicht mehr. Nachdem wir nun unsere Verstärkerschaltung aufgebaut und unseren Sensor angeschlossen haben, kommt nun der große Moment. Wenn die komplette Schaltung ca. 30-40mA zieht, dann passt alles. Jetzt schließen wir den Ausgangspin des Verstärkers an ein Oszilloskop an. Solltet ihr kein Oszilloskop haben, könnt ihr zur Not auch den Mikrofoneingang der Soundkarte im Pc verwenden. |

|

|
|
Solange sich nichts vor dem Sensor bewegt, sehen wir eine schöne gerade Linie am Oszilloskop. Wenn wir jetzt mit der Hand davor uns bewegen, sehen wir ein wellenförmiges Signal. JUHU! Unser Radarsensor spuckt also nun ein analoges Signal aus. Wie werte ich das Signal jetzt aus? Bevor wir uns nun überlegen wie und was ausgewertet werden soll, muss das analoge Signal erstmal erfasst werden. Ein Oszilloskop liest das Signal zwar schön ein, gibt uns aber keine Möglichkeit damit Berechungen zu erstellen. |
|
Aus diesem Grund nehmen wir jetzt einem Atmel Microcontroller. Jeder Controller der ATMEGA Reihe besitzt einen oder mehrere ADCs (Analog Digtal Converter). Mit Hilfe des ADC können wir das analoge Signal in digitale Werte umwandeln (samplen). Ich verwende in diesem Beispiel einen ATMEGA16 (ein Atmega8 reicht auch aus). Um sauber samplen zu können, müssen wir darauf achten, dass die Versorgungsspannung sauber ist und der Pin AVCC am ATMEGA an der Versorgungsspannung hängt. Sollte die Versorgungsspannung Störungen beinhalten bzw. der ADC am ATMEGA nicht richtig beschaltet sein, sehen wir das später in unserem Radarsignal und es erschwert uns die Auswertung. Die minimale Beschaltung bei der Verwendung des ADCs wird auf dieser Seite sehr schön erklärt: http://www.mikrocontroller.net/articles/AVR-Tutorial:_ADC Um das Radarsignal zu visualiseren und die Auswertung zu vereinfachen, benutze ich den ATMEGA nur zum samplen und leite die eingelesenen Werte per USB/RS232 an den Pc weiter. Das geht ganz einfach mit dem FT232RL IC von FTDI. Ich schicke nun also nur einen kleinen Befehl (&HFB) an den ATMEGA und dieser liefert mir 128 gesampelte 8-Bit Messwerte im Bereich 0-255. |

|

|
|
Das Programm zur Auswertung habe ich in VB.Net 2010 geschrieben. Auf dem linken Bild sehen wir nun das Radarsignal, wenn sich nichts bewegt. Auf dem rechten Bild sehen wir das Signal, wenn sich etwas vor dem Sensor bewegt. Die Auswertung |
|
Jetzt wo wir die Daten in digitaler Form vorliegen haben, können wir mit der Auswertung beginnen. Unser RSM-1650 Sensor ist in der Lage uns folgende Informationen zu liefern:
1. Bewegt sich ein Objekt vor dem Sensor 2. Bewegt sich ein oder mehrere Objekt(e) vor dem Sensor und mit welcher Geschwindigkeit Auswertemöglichkeit Nr. 1
Die erste Auswertemöglichkeit ist mit Abstand die Einfachste. Wir möchten einfach nur erkennen, ob sich ein Objekt vor dem Sensor bewegt. Wir wissen bei dieser Auswertemethode aber nicht, ob es sich nur um ein oder mehrere Objekt(e) handelt. Des Weiteren erfassen wir auch keine Geschwindigkeit.
Wir bekommen vom Microcontroller 128 Werte zwischen 0 und 255. Wenn sich nichts bewegt, sollte unser Rauschwert ständig so ca. um die 133 sein. Jetzt setzen wir uns einen Schwellwert. Je niedriger wir diesen setzen, umso empfindlicher werden wir darauf reagieren. Ich setze nun mal den Schwellwert z.B. auf 140. Bewegen wir uns jetzt vor dem Sensor, müssen wir nur noch abfragen, ob mindestens ein Wert unserer 128 Messwerte über die 140 geht. Wenn das der Fall ist, bewegt sich also etwas und wir geben Alarm. |

|

|
|
Das Ganze können wir noch ein bisschen intelligenter machen. Sollte z.B. eine Fliege vor dem Sensor vorbei fliegen, könnte das auch den Alarm auslösen. Bei diesem Problem wäre zu prüfen, wie lange und wie oft unser Schwellwert überschritten wird. Somit können wir unterscheiden, ob eine Fliege nur ganz kurz vorbei fliegt oder sich ein Mensch länger davor bewegt.
|
|
Eine kleine Präsentation hier in diesem Video. |
|
Auswertemöglichkeit Nr. 2
Bei der zweiten Auswertemöglichkeit möchten wir die Geschwindigkeit des Objektes erfassen. Zuvor haben wir an unseren 128 Werten gesehen, dass der Sensor ein wellenförmiges Signal liefert. Wir sehen hier die Dopplerfrequenz. Eine Schwingung entspricht 1 Hz. Um die Geschwindigkeit des Objekts aus der Dopplerfrequenz zu berechnen, gibt es eine ganz einfache Faustformel. |

|

|
|
44Hz die Sekunde entspricht 1 km/h
Dies gilt nur für einen Sensor mit 24 GHz Sendefrequenz und wenn sich das Objekt geradelinig zum Sensor hin oder davon bewegt. Bewegt sich das Objekt unter einem Winkel (z.B. 45°) am Sensor vorbei, muss noch cos(a) mit einbezogen werden. 44Hz * cos(45) entspricht 1 km/h Missachten wir den Winkel entstehen Abweichungen in der Genauigkeit (bis zu 30%). Das ist z.B. auch der Grund, warum ein Polizeiradar immer exakt zur Fahrbahn ausgerichtet werden muss. Wenn es uns aber nicht genau auf die Geschwindigkeit ankommt (z.B. Alarmanlage), kann der Winkel auch vernachlässigt werden. Zurück zur Auswertung. Wir zählen nun einfach wie viele Sinuswellen wir in der Sekunde erhalten und teilen den Wert durch 44 um km/h zu erhalten. Diese Auswertung hat nur einen Haken! Das funktioniert nur, solange sich ein einziges Objekt vor dem Sensor bewegt. Bewegen sich nun zwei Objekte oder mehr vor dem Sensor, erhalten wir einen Frequenz Mischmasch. Das Sinussignal sieht dann dementsprechend anders aus und die Auswertung wird ein völlig falsches Ergebnis liefern. Wenn wir z.B. ein Auto messen, wird diese Auswertung wahrscheinlich gut funktionieren. Messen wir einen Fußgänger der dummerweise noch seine Arme hin und her bewegt, haben wir schon drei Objekte. Eventuell sogar fünf Objekte, da der Sensor auch die Beine sieht. Die Auswertung ist also nur bedingt einsetzbar. Dafür aber einfach. |

|
|
Des Weiteren können uns auch noch diverse Störsignale das Leben schwer machen. - Leuchtstoffröhren können ein 50-60 Hz Signal erzeugen - Ein Pc Bluetooth Adapter erzeugte bei mir im Verstärker ein Störsignal - Die UART Datenübertragung vom Atmega zum Pc erzeugte im Verstärker ein 15 Hz Signal ... Als Lösung kann man am Verstärker die Bandbreite verändern und die untere Frequenzgrenze erhöhen (z.B. 88Hz). Somit blenden wir den störanfälligen Bereich bis 60 Hz einfach aus. Erfassen dadurch aber erst Objekte ab 2 km/h. Was in den meisten Fällen nicht weiter schlimm ist. Man kann auch in die Verstärkerschaltung einen sogenannten Kerbfilter einfügen. Der ist aber teuer und aufwendig. Davon rate ich ab.
ABER es gibt noch eine weitere Auswertemöglichkeit Nr.3!! Die dritte Auswertemöglichkeit wird etwas schwieriger. Das Stichwort lautet FFT (Fast Fourier Transformation). Mit Hilfe einer FFT Berechnung können wir unser gesampeltes Sinussignal (=Zeitsignal) in Frequenz (Hz) und relative Signalstärke umrechnen.
Bei einem Objekt sieht das Ergebnis folgendermaßen aus: |
|
|

|
|
Bei zwei Objekten: 1. Objekt mit 1 km/h entspricht 44 Hz 2. Objekt mit 5 km/h entspricht 220 Hz |
|
|

|
|
Das Ergebnis der FFT kurz erklärt Wir werfen 128 Werte in unsere FFT Routine. Als Ergebnis erhalten wir das Signal in Frequenz und Signalstärke umgewandelt. Zeichnen wir das Ergebnis nun mal auf. Schnell wird auffallen, dass unser Ergebnis gespiegelt ist. Das ist ganz normal, denn bei dieser Methode entstehen rein mathematisch auch "negative Frequenzen". Es ginge viel zu weit, dies zu erklären. Wir können also nur die Hälfte, also 64 Werte verwenden. Der Rest kann verworfen werden. Des Weiteren wird noch der erste Wert verworfen. Der ist immer riesig und unbrauchbar. Hier das Ergebnis in bereinigter Form. |

|

|
|
Wir sehen nun, bei einer FFT bekommen wir die Objekte bei einer bestimmten Geschwindigkeit in Form von Peaks geliefert. Je besser das Objekt unser Signal reflektiert, umso höher der Peak. Eine FFT ermöglicht uns auch bestimmte Frequenzbereiche einfach zu missachten. Somit lassen sich z.B. Störsignale filtern. Die Bilder zeigen hier simulierte Messwerte. Die Wirklichkeit sieht ein bisschen unschöner aus. |

|

|
|
Hier eröffnet sich eine neue Welt! Die Welt der digitalen Signalverarbeitung (DSP).
Wie funktioniert eine FFT?
Interessiert an einem praktischen Beispiel? |
|
|
|
|
Interessiert Sie das Thema Radarsensorik? Dann kann ich folgendes Buch empfehlen.
Das vorliegende Buch versucht über 178 Seiten, den unbedarften Leser in die geheimnisumwitterte Thematik der „Radarsensorik“ einzuführen und ihm nahezubringen, dass er unbewusst täglich damit zu tun hat. Keine Angst, man braucht kein Ingenieur oder Physiker zu sein, um dieses Buch zu verstehen. Im Gegenteil, am besten geht man unvoreingenommen an dieses Thema heran und lässt sich in drei Kapiteln erzählen, - worum es bei Radarsensorik überhaupt geht - wo sie einem auf Schritt und Tritt begegnet - was die einfachsten physikalischen Grundlagen dafür sind.
|
Erhältlich hier im Webshop!
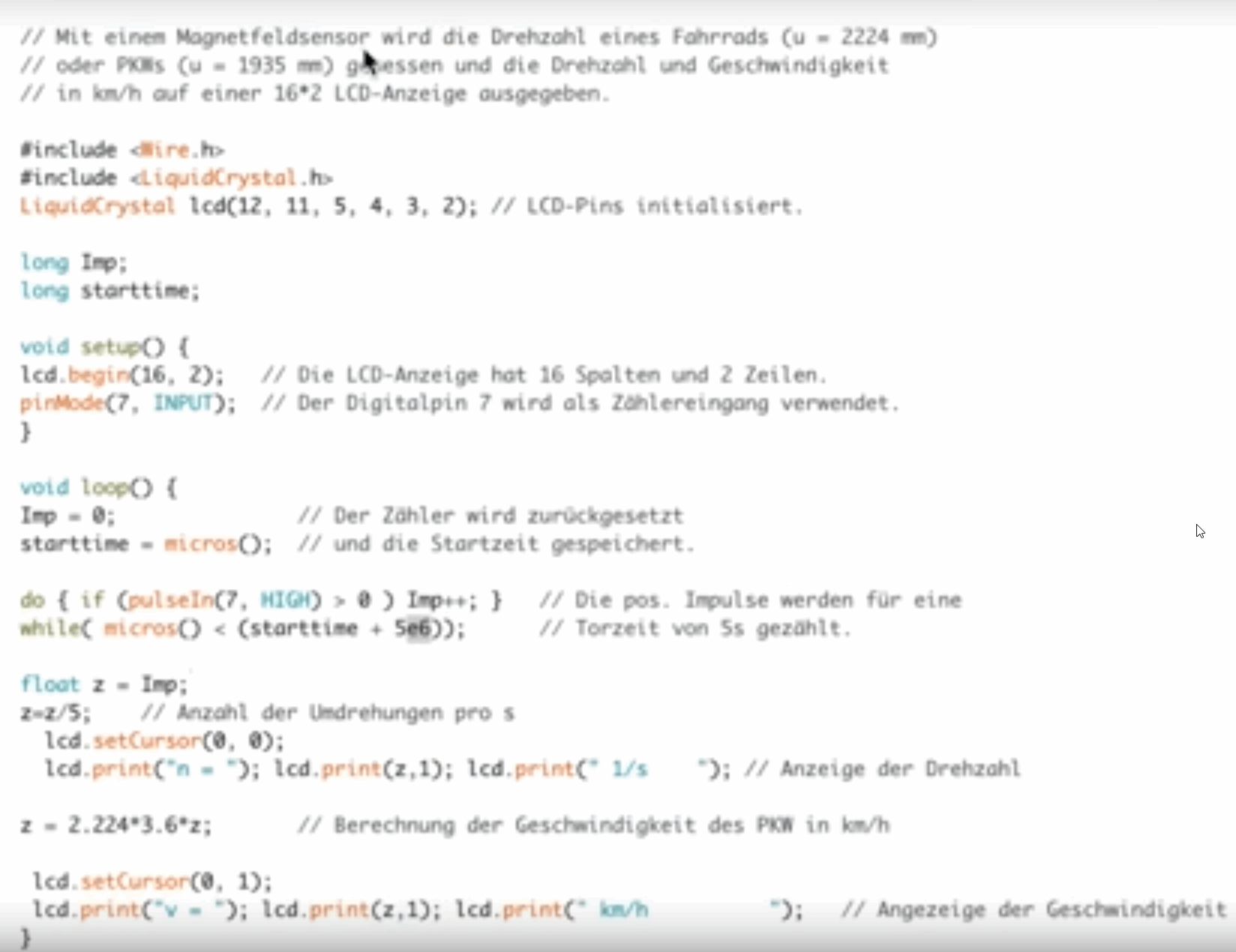
Radarsensor 165 von Herrn Berndt aus Düsseldorf!
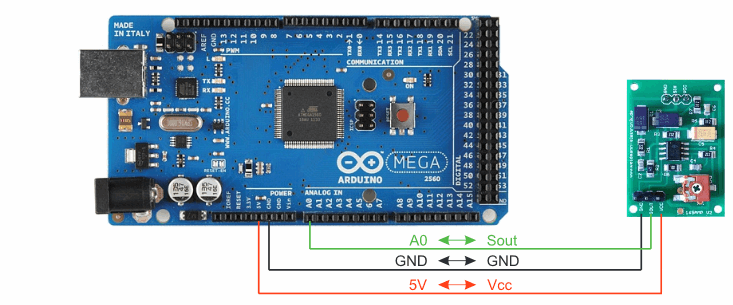
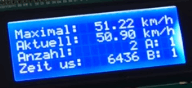
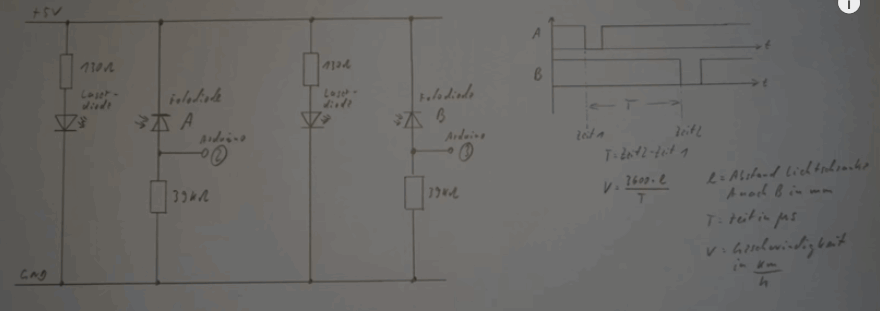
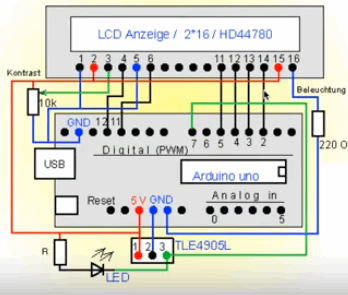
Geschwindigkeits-messung mit Arduino
http://hjberndt.de/soft/radar/index.html
Radarfalle - Radarfall
http://hjberndt.de/soft/radar/indexfall.html
Vielen Dank für diese zwei tollen Beiträge!
Quelle:
http://www.weidmann-elektronik.com/index.php?option=com_content&view=section&layout=blog&id=17&Itemid=21
DIN A4 ausdrucken
ENDE